本文研究模数转换器的量化误差.
ADC 将输入值转换为一组离散级别中的一个值,并输出数字代码以指定量化级别。量化过程会给系统带来一些误差。
本文将通过将斜坡输入应用于量化器来研究量化误差。然后,我们将看一个示例,其中量化误差类似于噪声源。此外,我们将讨论使用噪声源对量化误差进行建模的优点。我们将在本文的下一部分继续讨论。在那里,我们将研究允许我们使用噪声模型的假设,并且我们将使用获得的模型来表征量化误差的影响。
理想的单极三位 ADC 的传递函数如图 1 所示。
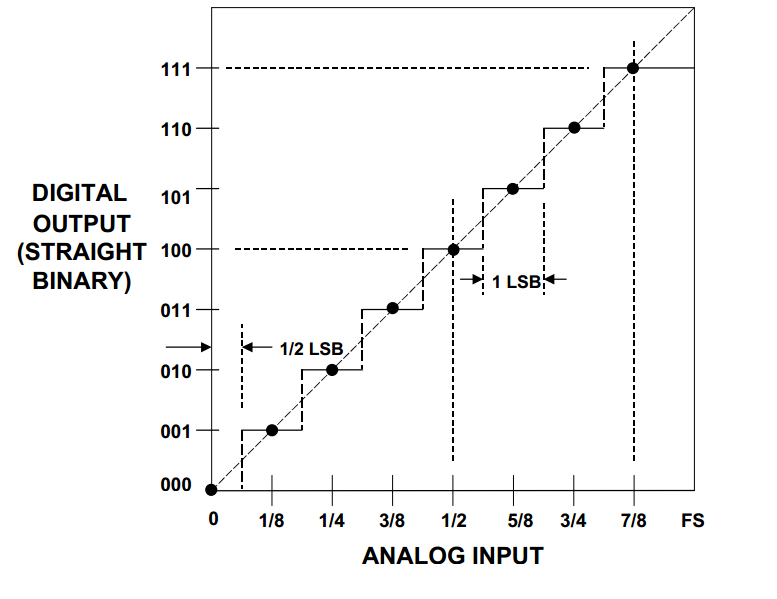
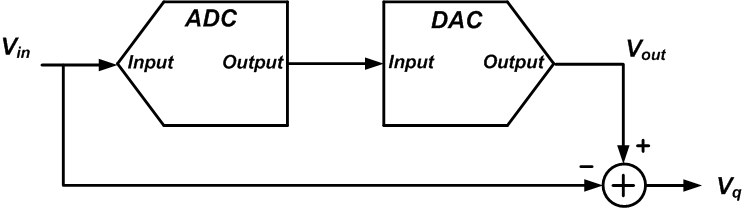
模拟输入的满量程 (FS) 值被分为八个相等的间隔(用 ?、1/4、... 表示)。在这些间隔的中点,存在从一个数字输出值到下一个数字输出值的转变。除个和一个台阶外,其他台阶的宽度都等于 FS/8。步长 (FS/8) 还指定输出数字代码的有效位 (LSB) 的模拟值。因此,如果我们将上述 ADC 的输出应用于理想的数模转换器(图 2),代码 001 将产生模拟值 FS/8,代码 010 将产生 FS/4,依此类推。

这里重要的一点是,给定的数字代码代表一系列模拟输入值;输入的幅度被量化。例如,从FS/16到3*FS/16的所有输入值都由一个输出代码(代码001)表示。如果我们将 ADC 的输出连接到理想的三位 DAC(图 2),代码 001 将产生模拟值 FS/8。因此,从 FS/16 到 3*FS/16 的模拟值由单个模拟值 FS/8 表示。因此,即使是理想的幅度量化也会引入一些误差。该误差称为量化误差 (V q ),可以通过从 DAC 输出 (V out ) 中减去 ADC 输入 (V in ) 来计算,如下图 3 所示。
让我们将斜坡信号应用于上述设置的输入,并更仔细地检查量化误差。图 4 中的蓝线显示了应用于输入的斜坡。此外,该图以红色显示了我们在 DAC 输出中获得的量化电平。
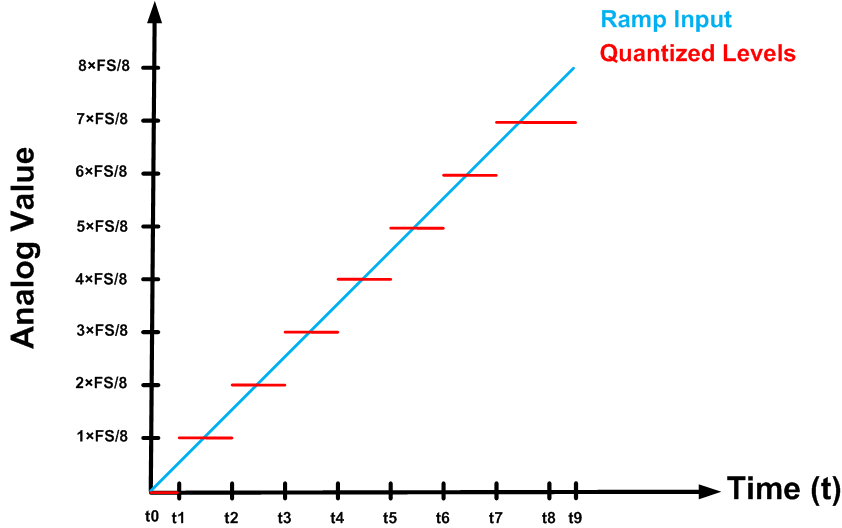
在t 0和t 1之间,输入小于FS/16。考虑到图 1 的输入输出特性,ADC 输出为 000,这给出了量化模拟值 V out = 0。如图 5 所示,此间隔的量化误差从 0 到 - ? ? FS/8(负半个 LSB)。
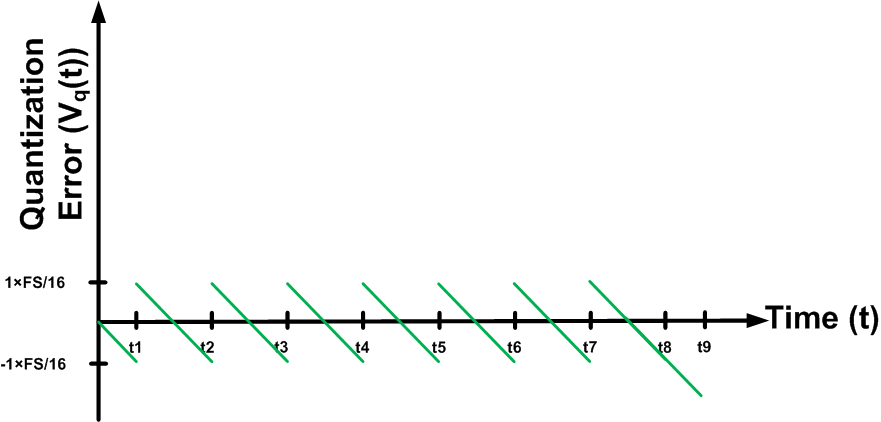
在t 1和t 2之间,输入大于FS/16且小于3FS/16。ADC 输出为 001,给出量化模拟值 V out = FS/8(见图 1 和 4)。对于此间隔,量化误差范围为 + ? ? FS/8 到 - ? ? FS/8(参见图 5)。同样,我们可以找到其他量化级别的误差值,如图 5 所示。请注意,除了一个级别之外,量化误差始终在 ± FS/16(半个 LSB)之间。
现在我们可以使用图 5 来计算斜坡输入的量化误差的均方根 (RMS) 值。在区间 T 1 < t < T 2内定义的函数 f(t) 的 RMS可通过以下等式获得:
对于图 5 的误差波形,我们有:
为了简单起见,我们忽略波形的部分 (0 < t < t 1 ) 和部分 (t 8 < t < t 9 )。随着量化器分辨率的提高,忽略这两部分而引入的误差会减小。我们获得:

上式中的积分对应于同一信号的时移版本。时间平移不会改变曲线下的面积(或等效地,其积分)。因此,这些积分项是相等的。由于 t 2 -t 1 = t 3 -t 2 = …= t 8 -t 7,我们可以将上式简化为:

我们可以直接计算上面的积分。然而,为了使计算更简单,我们假设t 2 -t 1 = T并对波形应用-T/2的时移。因此,我们可以简单地计算 V q ,new (t)的 RMS,如下图 6 所示。

因此,方程 1 可以重写为
其中 V q ,new (t) 由以下等式给出:
将此方程代入方程 2 并计算得出
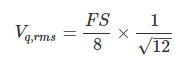
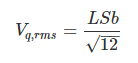
我们知道FS/8是LSB的模拟值。因此,RMS 误差由以下等式给出:
这是一个重要的结果,我们稍后将再次推导它(在本文的第二部分),从不同的角度看待问题。
让我们总结一下迄今为止的发现:我们发现,即使是理想的幅度量化也会在系统中引入一些误差,称为量化误差。为了研究该误差的一些特性,我们应用了斜坡输入并观察到误差的 RMS 与 LSB 值成正比。此外,如图 5 示例所示,量化误差始终在 ±LSB/2 之间。提高量化器的分辨率将减少 LSB 和误差项。此外,忽略图 5 中波形的部分 (0 < t < t 1 ) 和部分 (t 8 < t < t 9 ),我们观察到误差的平均值为零。另请注意,对于给定的输入值,我们可以计算出误差的准确值。
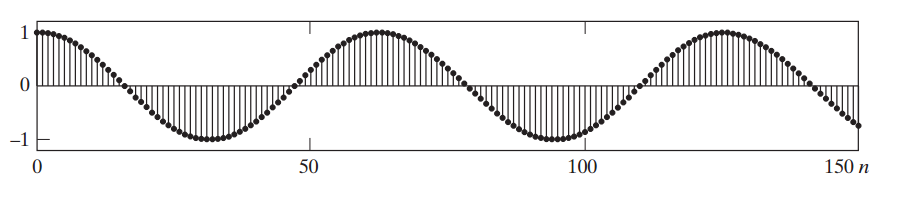
尽管上述讨论使我们能够深入了解量化误差的某些属性,但它基于一个不切实际的假设,即输入是斜坡。让我们看另一个例子。这次我们对离散余弦信号 x[n]=0.99cos(n/10) 进行量化,如图 7 所示。
如果我们对该信号应用 8 位量化器,量化误差序列将如图 8 所示。
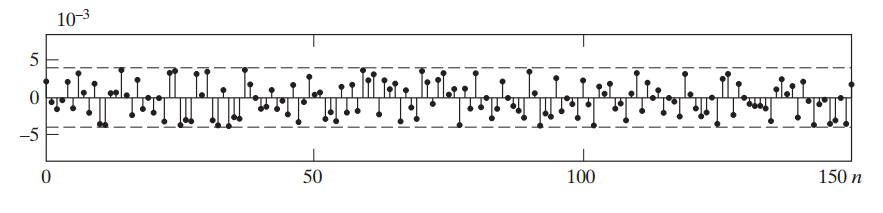
与斜坡输入的情况不同,此示例的误差似乎不遵循某种模式,并且计算 RMS 误差并不容易。将此示例的输入余弦与错误序列进行比较,我们观察到以下内容:
正如我们在斜坡输入示例中观察到的那样,我们知道量化误差信号并不是真正随机的,实际上可以针对给定的输入值进行计算。但是,如果我们可以在某些假设下将量化误差建模为随机信号呢?量化误差的幅度在 ±LSB/2 之间,这可能是一个很小的值,特别是当我们处理高分辨率量化器时。现在,如果这个低幅度信号以不可预测的方式变化,人们可能会得出结论,它类似于我们通常在不同电路和系统中遇到的噪声源。
将量化误差视为噪声源可以使问题简化很多。我们知道如何分析特定类型的噪声源对线性时不变 (LTI) 系统的影响。噪声源的瞬时值通常是不可预测的,因此时域分析是不可能的。然而,我们可以长时间观察噪声,并利用测量结果找到噪声的统计模型。例如,噪声源的一个有用特征是其“功率谱密度”(PSD),它使我们能够深入了解不同频带中噪声的平均功率。具有噪声信号的 PSD,
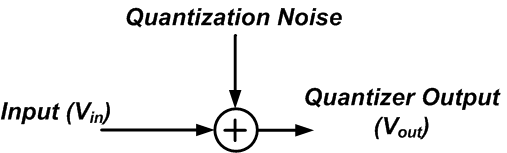
因此,假设可以通过噪声源对量化过程进行建模,我们只需要找到噪声模型的功率谱密度,并用它来表征误差对系统性能的影响。在这种情况下,我们可以使用图 3 的模型来描述具有加性噪声源的量化过程,如图 9 所示。如您所见,量化值 (V out ) 等于输入( V in )加上模拟量化误差 (V q )的噪声信号。
在本文的下一部分中,我们将研究将量化误差建模为噪声源的条件。然后,我们将深入研究所获得模型的一些重要特征,并使用它们来分析量化误差对系统性能的影响。
即使是理想的幅度量化也会在系统中引入一些误差,称为量化误差。该误差的 RMS 与 LSB 值成正比。看来 我们可以在某些假设下将量化误差建模为噪声信号。如果可能的话,这可以显着简化分析量化误差对系统性能的影响。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。