基于霍尔效应的 IC(例如 A1337)可以帮助您的设备执行与角运动相关的各种
传感器任务。
霍尔效应已被证明是一种相当有用的物理现象。它可用于涉及电流和磁场的各种测量应用。在近发表的一篇文章中,我讨论了基于霍尔效应的无刷直流电机驱动器。在本文中,我们将介绍一种利用霍尔效应来监测角度位置的 IC。
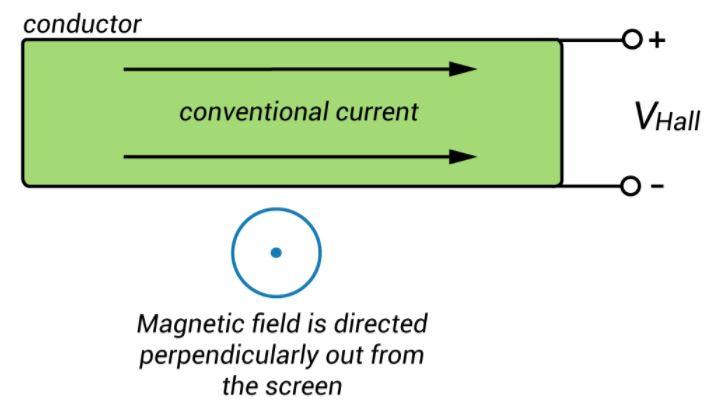
这里要理解的重要的一点是 IC 本身无法执行角度测量。如果我们考虑霍尔效应的本质,这一点就很清楚了,霍尔效应表达了电流、磁场强度和电压之间的基本物理关系。如果磁场恒定,则可以通过产生的霍尔电压来测量电流。如果电流恒定,则可以使用
霍尔元件来测量外部施加的磁场的强度。
因此,在测量角度位置时,霍尔元件只是一个磁场传感器。磁场传感器本身无法告诉我们有关旋转运动的任何信息。相反,我们必须创建一种磁场强度取决于旋转的情况,然后我们可以将霍尔测量结果解释为旋转位置。
磁铁+IC
Allegro MicroSystems 的A1337被描述为高度集成、基于霍尔效应的 0° 至 360° 角度传感器。它包括各种集成信号处理和便捷的数字通信。
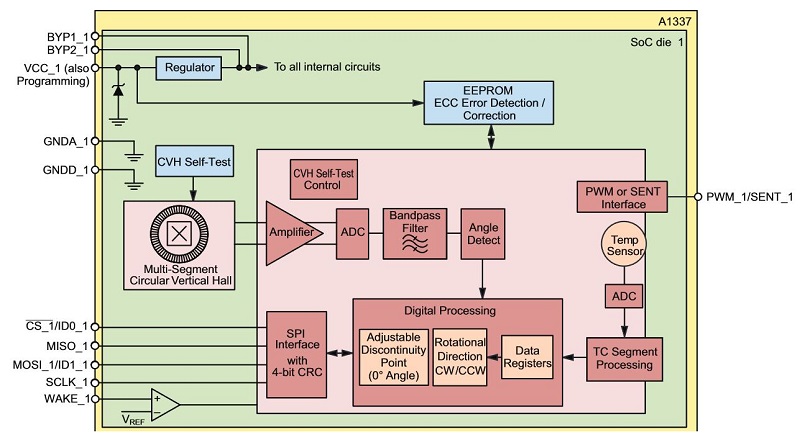
图表取自A1337数据表。
我真正欣赏的一件事是有关磁铁物理配置的清晰信息。
如下图所示,A1337 有两个霍尔元件。据我所知,拥有两个元素的目的只是为了提供冗余。
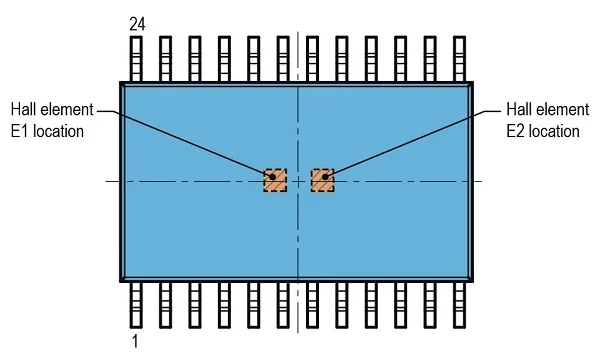
图表取自A1337数据表。
每个基于霍尔元件的传感器都可以测量与平行于 IC 表面的磁体相关的磁场矢量方向。另一种说法是,IC 可以监控放置在芯片表面附近的磁铁的旋转。(我想可以旋转 IC 而不是磁铁,但这将是更尴尬的方法......)
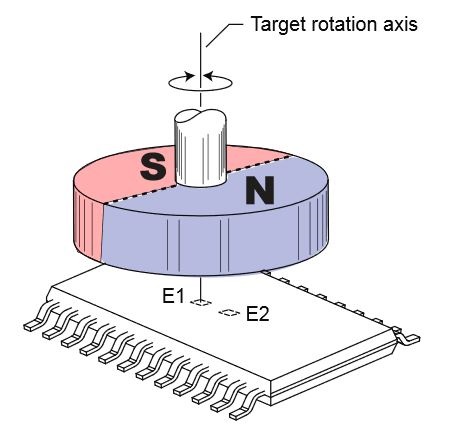
图表取自A1337数据表。
因此,A1337 间接测量旋转:磁铁与您想要监控的任何物体耦合,A1337 测量磁铁的角度行为。
合适的磁铁
A1337 负责角度测量中涉及的各种细节,但它本身并不购买磁铁。它也不会安装磁铁并确保其正确对齐。我不得不承认这对我来说是一个主要障碍,因为我觉得自己没有资格处理磁铁问题。
不过,如果您比我大胆一点,那么如果您密切关注数据表,您应该能够想出一个可行的解决方案。下图显示了基于 A1337 默认配置的正确磁铁排列。
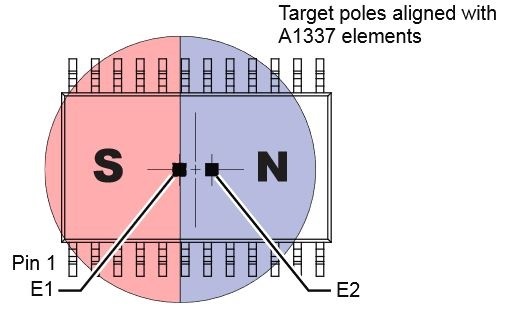
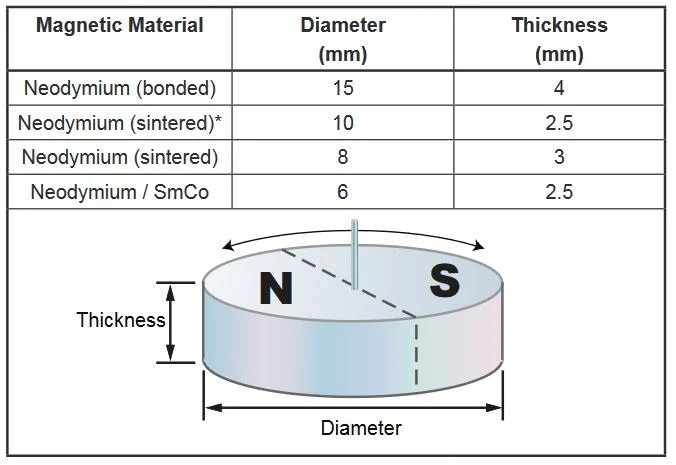
图表取自A1337数据表。
就磁铁本身而言,Allegro 建议您联系他们以获取有关磁铁选择的详细信息。这无疑是一个好主意,尽管数据表确实包含一些帮助您入门的信息:
角度与转速
A1337 是一款角度传感器。然而,如果你知道了角度,你也就知道了角速度;您所需要做的就是监控角度随时间的变化。因此,角度传感器是监测物体旋转速度的一种非常合理的方法。
事实证明,A1337 兼容相当高的角速度(高达 30,000 RPM,“精度较低”)。然而,重要的是要认识到角度精度和转速之间存在反比关系。这是一个延迟问题。
毫不奇怪,旋转磁体的状态不会立即反映在 A1337 的输出数据中。完成所有这些测量工作需要一些时间。如果磁体缓慢旋转,当前输出数据仍然是磁体当前位置的相当准确的表示。但随着角速度的增加,延迟会导致数据与实际位置之间的差异越来越大。
A1337 数据表表明它可以提供高达约 500 RPM 的完整(即 12 位)分辨率。对于高于 500 RPM 的角速度,您需要切换到“高 RPM”模式,该模式以分辨率换取速度:刷新率显着提高,但分辨率降低至 10 位。
看来 Allegro 选择了 7600 RPM 作为阈值,在此阈值下 A1337 的性能不再令人印象深刻。您仍然可以获得角度数据,但在此 RPM 范围内,您可能使用该设备来测量角速度。