O 引言
Sigma-Delta ADC是一种目前使用为普遍的高ADC结构,在达到16位以上的场合,Sigma-Delta是必选的结构。从原理上来说,它有点类似于游标卡尺。我们知道,游标卡尺上的刻度其实并没有0.02mm,但是我们却可以用它来测量到0.02mm的。是不是很神奇?原理就在于,主尺的刻度是1mm,副尺的刻度是0.98mm,测量过程中把1mm和0.98mm的差值不断累积,这个过程就是Delta-Sigma。1mm与0.98mm的差值就是Delta,不断累积,直至主副尺重合的过程就是Sigma。
Sigma-Delta ADC的运作过程,就是把待测信号Vin与参考电压正、负Vref之间的差值进行不断的累积并通过反馈令这个差值趋于零。
随着近些年来无线通信与视频技术的广泛应用,在这两个方向上主要使用Pipeline ADC和连续时间Sig-ma-Delta ADC(CTSD)。相比于Pi-peline ADC,连续时间Sigma-Delta ADC主要有以下几个优点:它有着更低的功耗,并且自身固有的抗混叠滤波功能,省去Pipeline ADC对前置滤波器的苛刻要求。
在本文中,设计了一款三阶一位单环反馈结构的连续时间Sigma-Delta ADC,其带宽可达5 MHz,为10位,其中积分器采用RC积分器的形式。系统引入了半个周期的延时,提高了系统的稳定性,使得输入信号的幅度大幅提高,进一步增加了调制器转换信号的。同时,由于采用了新型的系统结构和非回零D/A转换器,使得调制器忍受时钟抖动的能力有了很大的提高,在与同类型的ADC设计的比较中达到了较高的水平。
1 系统结构设计
1.1 结构设计
选择单环结构来实现系统的设计。为了实现5 MHz带宽和10位的,首先分析单环结构理论上的动态范围公式:

式中:L为系统阶数;N为量化位数;OSR为过采样率。
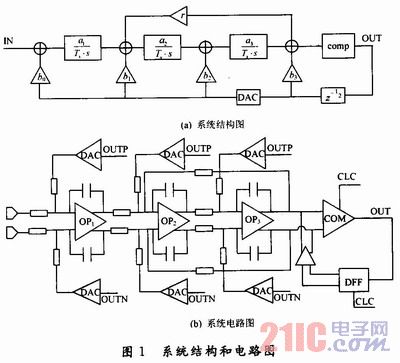
选取的系统结构见图1。对于单环结构来说,当系统的阶数超过三阶后,系统的稳定性会受到影响,从而导致可实现的动态范围降低。多位量化器需要校正电路,增加了电路的成本和面积,而一位量化器和D/A转换器具有天然的线性,减小了系统的非线性误差。在设计时,利用图1中b3这一路的反馈来系统地补偿环路延时。结合系统对动态范围的要求,根据式(1),选择系统过采样率OSR=32。
由于连续时间Sigma-Delta ADC缺少现成的设计工具,该设计采用的方法是先设计好离散时间的噪声传递函数NTF(z),根据式(2):
![]()
求出离散时间的环路传递函数H(z),再利用Matlab工具箱中的d2cm函数将H(z)转换为连续时间结构的环路传递函数H(s)。由于本结构的环路中加入了半个周期延时,故根据文献中的方法,将H(z)转换成等价的H()。因此,传递函数变为式(3):

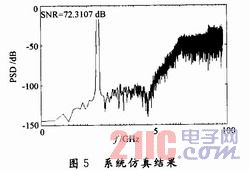
式(3)中分离出来的系数bn-1’就是系统结构图1中反馈系数b3,通过对系数b3的选择可以地补偿系统中半个周期的延时。再利用d2cm函数将H()转换为H(s)。经过Sealing后,得到系统的系数为a1=O.3,a2=0.3,a3=0.5,b0=1,b1=1,b2=1,b3=O.9,r=-0.04。经过系统仿真可知,在处理5 MHz带宽内的信号时,系统的信噪比可达到72.3 dB。
1.2 时钟抖动
时钟抖动(clock jitter)对连续时间Sigma-DeltaADC的影响要比对离散时间Sigma-Delta ADC的影响大的多。时钟抖动对连续时间Sigm-aDelta ADC的影响主要体现在采样电路和DAC上。对于采用的非回零(NRZ)反馈DAC,可以把抖动噪声表示为式(4): ![]()
△TDAC[n]为采样时钟的抖动误差。将抖动噪声的方差表示为式(5):
![]()
其中dy=y[n]-y[n-1]。利用式(4)和(5),根据文献对系统受时钟抖动的影响进行建模仿真,可以得到,调制器在时钟抖动大约为30 ps时,SNR仍可保持在64 dB以上。
2 电路结构设计
在系统建模达到要求之后,采用图1(b)中的实际电路来实现系统的建模。电路包括三阶一位环路RC积分滤波结构、四输入一位量化器以及一位电压型NRZ DAC,采用RC积分滤波是因为这种滤波形式有更好的线性度和输出电压摆幅,可以实现更高的信噪比,同时为反馈DAC提供更好的虚拟地端。
2.1 运算放大器
在环路设计中,运算放大器的设计是关键。对运算放大器进行建模,仿真得到在满足系统要达到的指标要求的情况下,运算放大器的DC Gain至少到达55 dB,增益带宽积GBW要达到2~3倍的采样频率,约为650~900 MHz。在设计中,选择电阻自偏置的折叠共源共栅放大器,如图2所示。
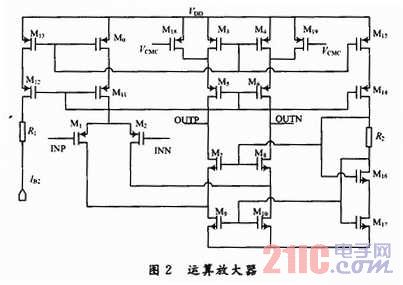
在设计中,VCMC为运放共模反馈电压,为电路提供稳定的共模电平。两个含有电阻支路为整体电路提供偏置,由IB2端输入基准电流。在CMOS标准工艺中,电阻的的大小变化很大。仿真显示,该设计中所采用的偏置电阻的值在8.4~15.6 kΩ之间变化时,偏置电路仍可为整体电路提供适当的偏压,运算放大器各指标所受的影响较小,仍可满足系统的要求。
级运算放大器没有受到噪声整形,所以对噪声的要求为严格。选择PMOS差分对作为输入,以减少噪声。运放差分输入对的热噪声为:

由式(6)和(7)可以看出,在设计中为了降低噪声,可以将晶体管M1的跨导设计得较大,将晶体管M3和M9的跨导设计得尽量小一些。终设计中输入差分对M1和M2的宽长比为W/L=6/0.2。
仿真显示,在各工艺角下,运算放大器差的性能是在sf下仍可达到DC Gain=66 dB,GBW=960 MHz。
2.2 四输入一位可再生比较器
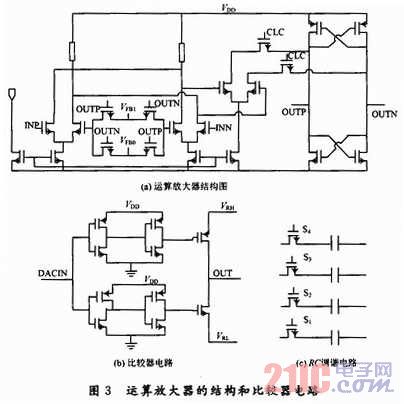
系统中采用的比较器结构如图3(a)所示,该比较器在结构上分为3个部分。部分为一个四输入的前置运算放大器,用来比较电压和提高比较器的比较速度。电压VFB1和VFB0用来实现系统建模中的系数b3,通过输出端OUTP和OUTN来实现反馈电压极性的控制。通过仿真得出,比较器的延时小于1 ns。
2.3 D/A转换器
本文采用的D/A转化器的结构如图3(b)所示。两个参考电压VRH和VRL分别为1.4 V和O.4 V(即差分参考电压为1 V)。考虑输出端的寄生电容,仿真显示,该电路延时小于1 ns。
2.4 RC调谐结构
该系统中采用RC积分滤波结构,系统的滤波系数是由电阻与电容乘积的决定。系统仿真显示,RC乘积值变化范围在±6%以内可以使系统的SNR仅下降1 dB。采用的RC调谐电路如图3(c)所示。4个电容的阻值分别为C1=150 fF,C2=300 fF,C3=600 fF,C4=1.2 pF。通过对开关信号S1,S2,S3和S4电平高低的控制,可以使电容实现2.25 pF,150 fF的值。
3 芯片实现
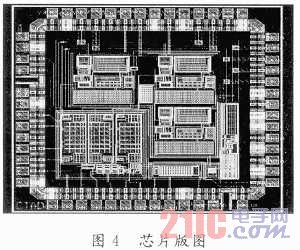
在TSMC O.18 μm工艺下绘制的系统版图如图4所示。芯片所需的时钟信号由外部的低抖动信号发生器提供,时钟信号尽量靠近反馈到输入级的DAC以减小延时。版图中模拟电路部分与高速数字部分分隔以减小影响。
4 实验结果
通过Candence提取系统版图后仿真电路,在不同工艺角下对使用HSpice对系统进行后仿真,得到系统SNDR如图5所示(TT工艺角下),SNDR可达63.6176 dB,输入差分信号幅度为O.55 V。
针对CT Sigma-Delta ADC各种结构对时钟抖动的忍受能力这一问题,将本文结构与其他论文进行对比,结果如表1所示。可见,该设计对时钟抖动的忍受能力是很强的。

5 结语
采用TSMC O.18μm CMOS工艺,在1.8 V电源电压下设计了一款连续时间Sigma-Delta ADC调制器,完成了电路设计和版图绘制。经后仿真验证此Sig-ma-Delta ADC调制器带宽达到5 MHz,信噪比SNDR可达63.6 dB。芯片在硅片上所占面积为1.5 mm×1.5 mm,而其调制器本身所占面积只有O.9 mm×0.9 mm,功耗仅为32 mW。与同类设计进行比较,该设计对时钟抖动的忍受能力是很强的。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。