自平衡机器人的控制系统设计

引 言 移动式机器人在各行各业具有广泛的应用,而轮式移动机器人由于具有结构简单...
日期:2009-12-15
基于ARM9的仿人机器人分布式控制系统

摘 要:本文提出了一种以ARM9为主控制器的新型的仿人机器人分布式控制系统。单片机和外部计数器组成关节控...
日期:2009-11-28
基于DSP仿人机器人关节控制器设计
0 引 言 仿人机器人具有可移动性,具有很多的自由度,包括双臂、颈部、腰部、双腿等,可以完成更复杂的...
日期:2009-11-23
基于WLAN 的多移动机器人通信系统设计
摘要:多移动机器人系统分布式控制结构的通信机制的研究具有重要意义。本文根据移动 机器人系统在军事通信...
日期:2009-11-19
机器人遥操作网络通信平台的设计

目前,机器人遥操作系统已成为机器人研究的一个热点。在机器人遥操作的过程中,本地服...
日期:2009-11-10
移动探查机器人监督式控制器的设计与实现
摘要:本文介绍了一个野外探查机器人监督式控制器的设计与实现,介绍了机器人控制器的三种传统控制方法并比...
日期:2009-11-06
基于模糊控制信息融合方法的机器人导航系统
摘要:本文提出了一种基于模糊控制和信息融合的自主式移动机器人导航系统的实现方法。采用表格查询的模糊控...
日期:2009-11-06
神经网络在移动机器人路径规划中的应用研究
摘 要: 移动机器人路径规划可分为两种类型:(1)全局路径规划;(2)局部路径规划。本文分析了Kohonen神经网络...
日期:2009-11-06
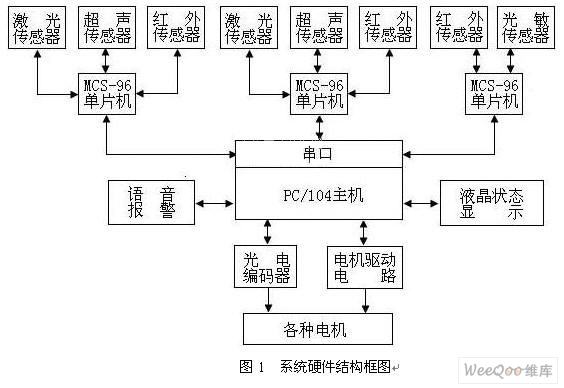
基于ARM9的嵌入式仿人机器人传感器系统设计

0 引 言 传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或...
日期:2009-11-06
基于无线通信的嵌入式机器人控制系统设计

1 引言 轮式移动机器人是机器人研究领域的一项重要内容,它集机械、电子、检测技术...
日期:2009-11-03
基于DSP的欠驱动体操机器人的摇起控制设计

1 引言 欠驱动机器人是一种部分关节为被动关节,能用较少的驱动装置完成复杂任务的...
日期:2009-10-29
智能轮式移动机器人嵌入式控制系统设计
引言 智能移动机器人集成了机械、电子、计算机、自动控制、人工智能等多学科的研究成果,在当前机器人研...
日期:2009-10-22
一种机器人视觉系统模块的原理分析及设计

一、概述 视觉技术是近几十年来发展的一门新兴技术。机器视觉可以代替人类的视觉从...
日期:2009-10-19
基于ARM的嵌入式服务机器人控制器的研究
1 引言 随着人口老龄化进程的加快,更多老年人,尤其是地震和疾病致残的残疾人,都需要照顾。基于此,这...
日期:2009-10-15
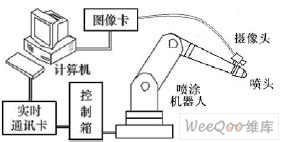
首钢莫托曼弧焊机器人系统的功能和特点
近年来,随着国家经济的飞速发展,作为国家现代化程度标志的机器人技术也得到了越来越多的应用。经过多年的...
日期:2009-10-10
可穿戴型下肢助力机器人感知系统研究

1 引言 可穿戴型下肢助力机器人是辅助型康复机器人的一种,是一种帮助人们扩展下肢...
日期:2009-10-09
基于激光雷达避障的机器人控制系统设计

0 引 言 移动机器人是一种能够感知外部环境,在有障碍物的环境中能够实现动态决策...
日期:2009-10-09
小型仿人机器人的设计及步态规划
1 引言 机器人是一门综合性很强的学科,有着极其广泛的研究和应用领域。机器人技术...
日期:2009-09-23
复杂路线下机器人的三点三轮寻迹系统

引 言 智能寻迹机器人是一种被广泛研究的机器人,而且国内外都有许多重要的比赛都...
日期:2009-09-21
基于多传感器数据融合的智能机器人设计
本系统所设计的机器人的主要任务是在未知环境下依靠多传感器信息,运用D-S数据融合算...
日期:2009-09-10
一种移动机器人遥操作接口系统的设计与实现

摘 要:针对移动机器人的远程操作问题,基于C++Builder软件环境,设计和实现了一种移...
日期:2009-09-08
基于BLDC的新型五自由度并联机器人运动控制
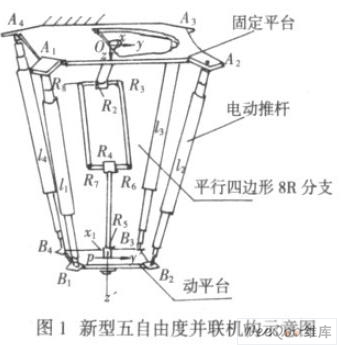
1 引言 并联机构是由多个并行链构成的闭环机械系统。相对于串联机构, 由于它的驱动...
日期:2009-08-24
吸尘机器人控制系统设计

引 言 随着人口的老龄化和社会福利制度的完善,导致劳动力成本的急剧上升,一些简...
日期:2009-08-20
一种视觉导航机器人的设计

0 引言 机器视觉系统是智能机器人的重要标志,机器人视觉系统模仿了人的视觉感知能...
日期:2009-08-18
智能机器人控制系统的设计与实现

1 前 言 机器人技术是融合了机械、电子、传感器、计算机、人工智能等许多学科的知...
日期:2009-08-10
基于连杆机构的双足机器人起立方法分析

摘要:双足机器人的起立动作是双足机器人步行之前重要的基本准备动作,本文通过连杆结...
日期:2009-08-10
基于PMAC 的机器人控制器调试系统的研制

摘要:以工控机IPC与可编程多轴控制器PMAC(Programmable Multi-Axis Controller)相结...
日期:2009-07-21
自主机器人自定位模块的设计

摘要:介绍了基于AT89C2051微处理器的机器人自定位模块的设计方法。为了解决用到的测...
日期:2009-07-21
基于机器视觉的工业机器人定位系统
摘要:建立了一个主动机器视觉定位系统,用于工业机器人对零件工位的定位。采用基于区...
日期:2009-07-21
基于VC++.NET 的串行通信的机器人控制系统设计

摘要:实现了一个基于PC的机器人控制系统,该系统由上位机(PC机)和下位机(单片机控制系...
日期:2009-07-21