特征
操作电源电压范围:VCC = 13.5至16.5 V电动电源操作电压范围:VBB = 50至420 V(高达450V,由于
电容器电压而限制)集成在单个软件包中的控制器和高压驱动程序。正弦波PWM驱动器或广角换向驱动器是可选的。内置振荡器电路(载波频率= F OSC /252(Hz))引导电路:内置引导
二极管内置的过电流保护,热关闭,电压储气不足和电动机锁检测。内部电压调节器电路(VREG = 5 V(典型),30 mA(Max),Vrefout = 5 V(typ。),35 mA(max))PCB尺寸64.77 x 57.15毫米4 x 3.2毫米安装孔2 x 8毫米孔的热潮孔电源序列电源顺序:请按照(1)到(3)的步骤提供电源。
应用VCC的电源。 (控制器芯片的电源)在应用VCC时,将VSP连接到GND或打开。 (vsp = vs on PCB上)如果CW/CCW,LA和SS的端子由外部IC的信号控制,请将其连接到GND或打开。应用VCC电源后,请在需要时设置CW/CCW,LA和SS端子的端子。应用VBB的电源。 (电动机)将电压施加到VSP。
电源关闭序列:请按以下(1)至(3)的步骤关闭电源。
将VSP设置为0V。 (vsp = vs on PCB上)如果CW/CCW的端子,LA和SS由外部IC的信号控制设置VSP 0V后,将它们连接到GND或打开。 (vsp = vs on PCB上)关闭VBB。关闭VCC。
输出电流
额定值为2 a,即使暂时也不能超过。使用IC设计一个实际的应用程序系统,以免使Inrush电流和锁定电流超过评分,尤其是当电动机启动并卡在锁定中时。可用的输出电流取决于使用条件(环境温度,安装板方法等)。设计一个具有足够边缘的实际应用系统,以使TJ不超过150°C。
铅角控制
根据诱导的电压,可以通过LA末端的输入电压调节驱动器输出的铅角。铅角的范围如下;正弦波PWM驱动器:0°至58°,广角传导驱动器:0°至28°°可以通过调节铅角来提高运动操作的效率。在通过施加铅角来调节电动机特性时,通过LA末端更改铅角并比较电动机电流。调整LA端子的电压,以地减少电动机电流,以比较在旋转速度相同的条件下更改导线角之前和之后的电动机电流。
SS = L(正弦波PWM驱动器)
LA模拟输入(32个单独的步骤中的0到5 V)0 V = 0°5 V = 58°(当LA电压超过5 V时,假设铅角为58°)振荡器频率(默认为20kHz = R5 68K欧姆,如果R5为75K欧姆频率18KHz)振荡频率(FOSC)范围应为3.5MHz至6.4MHz。振荡频率(FOSC)和PWM频率(FC)的关系如下; FC = FOSC/252。当r1 =68kΩ时,Fc = 20 kHz(典型),当r1 =75kΩ时,fc = 18 kHz(typ。)。
TR终端
当电动机锁定时,电动机锁定检测会运行,并打开和关闭驱动器输出(间歇性操作)。可以通过TR终端的外部电容器(C1)配置开车(TOFF)和驾驶(TON)(TON)。当不使用此功能时,请将此终端连接到SGND。外部电容器(C14)的关系和开启/关闭周期的关系大致计算如下。
设定时间
驾驶时期吨[s] = c1×(vh -vl)×2/i×500个计数器开车离开时期toff [s] = c1×vh -vl)×2/i×3000个计数器当C14 =0.01μF时,i =3μA(典型),vh = 2 V(typ。)和VL = 0.5V(典型),因此ton [s] = 5s(typ。)和toff [s] = 30s(typ。)当前的感官电阻输出电流(IOUT)与检测电阻(R6)之间的关系大致在以下公式中提供。 IOUT =电流检测VDC的VDC/ R6电压:0.475V(min。),0.5 V(typ。)和0.525V(值)示例)当电阻(R6)配置为0.51Ω,IOUT(IOUT(typ。)时= 0.5 V(typ。)/0.51Ω- 0.98 A请确定外部零件的额定值,因为大电流流动中的大电流流动检测电阻(R6)。在操作电动机时,检测电阻(P)上的功率如下计算; p = 0.525vx0.525v/ r6()。例如,当r6 =0.51Ω时,p = 0.540W。因此,请应用1 W或更多的电阻作为额定功率。
VSP引脚(在PCB VSP = VS上)
电动机和旋转速度的操作和停止可以通过输入值班的输出命令信号来控制VSP终端的命令信号。请输入模拟电压作为命令信号。此外,当需要控制旋转速度时,将其连接到MCU,并通过VSP信号和FG信号将其连接到控制电机旋转数的速度。
FG引脚
构建了5V输出的推动电路。当需要控制旋转速度时,将FG信号输入到MCU以使用此信号作为电动机旋转数字的信息。
CW/CCW引脚
通过固定端子的电压使用此端子,将其连接到Vrefout或SGND。在连接到Vrefout时,它变为高水平。在连接到SGND时,它变为低水平。通过输入外部控制信号,在使用此终端时,在应用VCC的电源后输入此信号。在关闭中,关闭控制信号后关闭VCC。在切换CW/CCW终端的逻辑时,请在设置VSP终端0.7V或更少并关闭操作输出后更改输入信号。切换输入信号后,通过VSP端子启动电动机操作。
FGC引脚
通过修复端子的电压,使用此端子,将其连接到Vrefout,sgnd或vrefout/2。在连接到Vrefout时,它变为高水平。在连接到Vrefout /2时,它变为M级别。在连接到SGND时,它变为低水平。通过输入外部控制信号,在使用此终端时,在应用VCC的电源后输入此信号。在关闭中,关闭控制信号后关闭VCC。
SS PIN
通过固定端子的电压使用此端子,将其连接到Vrefout或SGND。在连接到Vrefout时,它变为高水平。在连接到SGND时,它变为低水平。通过输入外部控制信号,在使用此终端时,在应用VCC的电源后输入此信号。在关闭中,关闭控制信号后关闭VCC。
HUP,HUM,HVP,HVM,HWP,HWM引脚
输入大厅信号向HUP,HUM,HVP,HVM,HWP和HWM终端信号。选择大厅元素或Hall ICs提供厅信号。将U,V和W的输出端子以及HUP,HUM,HVP,HVM,HWP和HWM的Hall信号终端连接到电动机,以在“参考时间表”的计时图中显示了关系。笔记使用电动机”。 如果从VREFOUT电源向大厅元素提供了5V,请将限制电阻添加到
霍尔元件的电源端子中,以便在霍尔元素的输入电流之内。 要正确识别大厅信号的切换,霍尔元件的幅度应为40 mV或更多,输入电压范围应为0.5 V至4.0 V。HALL放大器具有磁滞性。当它的幅度很小时,
开关时间的相位间隙就会大。因此,请尽可能大。 当降低霍尔信号噪声的电容器时,请将其与HUP和HUM端子,HVP和HVM端子以及HWP和HWM端子保持一致。推荐的电容器为0.001μF至0.1μF。
<注释在使用Hall IC>中,请配置HUP,HVP,HWP,HUM,HVM和HWM,如下所示。建议在输入端子和SGND之间采用低通滤波器,以减少噪声。但是,在这种情况下,应考虑输入信号的延迟时间。
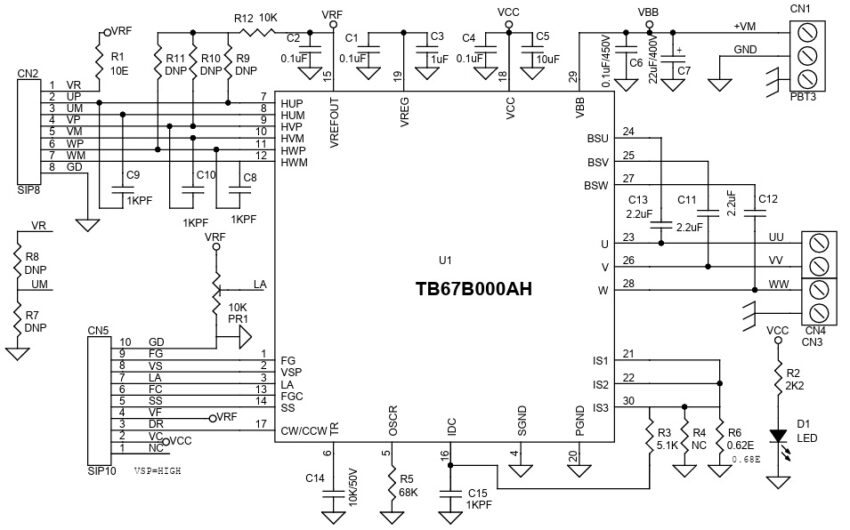
HUP,HVP和HWP:输入电压:H Level = Vrefout,L Level = SGND HUM,HVM和HWM:输入电压:VREFOUT/2 * *将其配置为Vrefout端子和SGND之间的电阻分隔电压。HUP,HVP和HWP:输入电压:VREFOUT/2 *将其配置为V Refout终端和SGND之间的电阻分配电压。 HUM,HVM和HWM:输入电压:H级别= VREFOUT,L LEVEL = SGND连接CN1:PIN1 = +VM电源供应50V至420V DC,PIN 2 = GND,PIN 3 = GNDCN2:引脚1参考霍尔传感器,引脚3 = Hall Sensor Hup,PIN 4 = HALL SENSOR HUM,PIN 5 = HALL SENSOR HVP,PIN 6 = HALL SENSOR HVM,PIN 6 = HALL SENSOR HWP,PIN 7 = HALL SENSSOR 7 = HALL SENSSOR HWM,引脚8 = GNDCN3:引脚1 =电动机W相,引脚2 =地球CN4:引脚1 =电动U相,引脚2 =电动机V相位CN5:引脚1 = NC,引脚2 = VCC 13.5V至16.5V,引脚3 = DIR CW/CCW(高或低),引脚4 = VREF 5V DC,PIN 5 = SS 5 = SS,引脚6 = FGC,引脚7 = LA速度控制电压输入,引脚8 = VSP,引脚9 = FG,PIN 10 = GNDD1:功率LEDPR1:用于速度控制的修剪器
电位器.