一个功能强大的孤立的H桥DC电动机驱动程序,该驱动器设计为高性能和广泛的应用。驾驶员使用四个IRF3205 N通道MOSFET,具有超低RD(ON)为8MΩ,用于有效的高电流
开关,并具有内部死时间控制的两个IR2104 MOSFET驱动器IC。低价的CA-IS3720数字隔离器芯片使电流隔离增强,从而增强了隔离的侧面安全性并地减少了噪声干扰。
PCB布局针对低噪声和高电流处理进行了优化。驾驶员的电动机电源电压为45VDC和12VDC调节的电源,驾驶员的电源用途足够多,可以运行电压低于12V的电动机。对于以12V或更多的方式运行的电动机,可以使用直接从电机供应派生的低电流线性或降压调节器来制备控制侧供应。该设计非常适合在工业和机器人系统中要求可靠,高电动机控制的应用。
图2显示,IR3205 MOSFET电流处理(流到源电流)是通过将8VDC施加至10VDC电压到栅极引脚实现的。在我们的电路中,栅极的峰值电压(源到源)引脚为12V,这使MOSFET具有完整的开关电势。图2显示了脉搏占空比与MOSFET的热响应之间的关系。
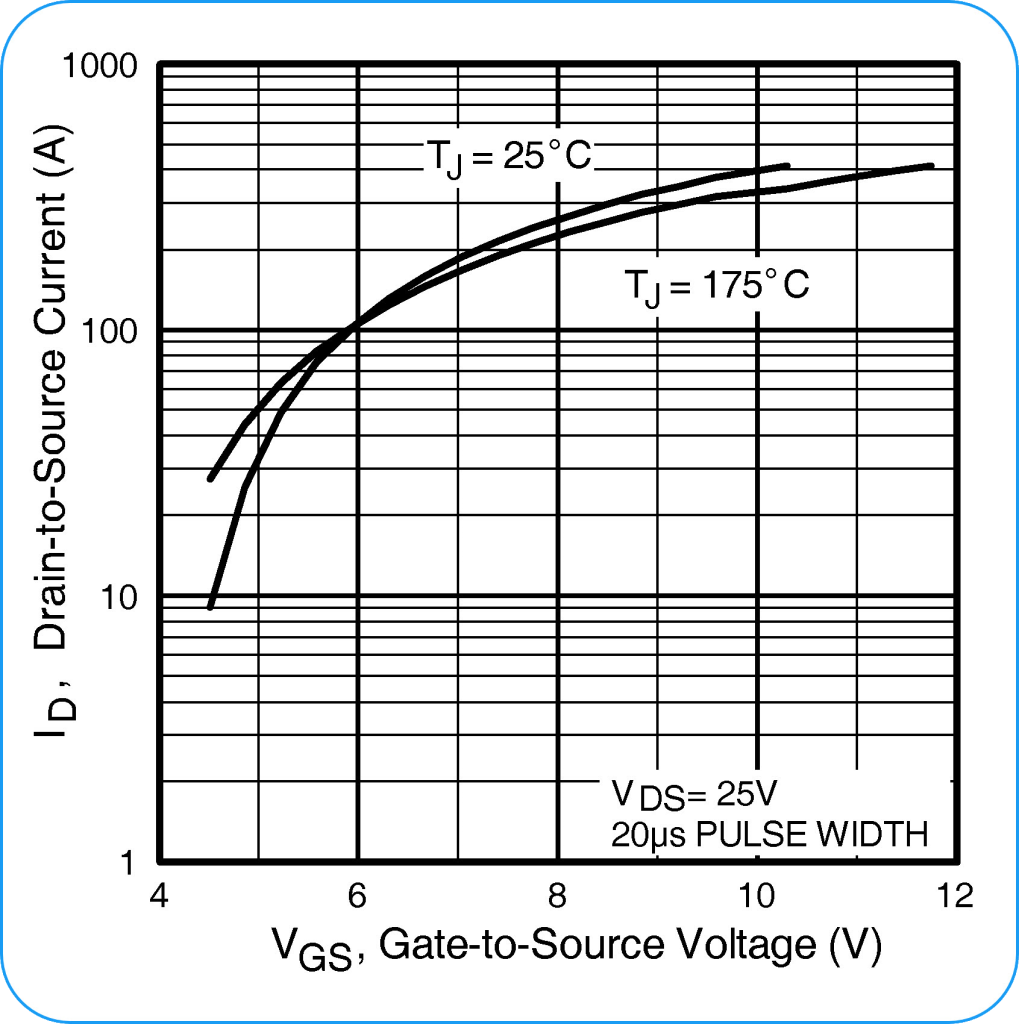
图2:IR3205 MOSFET的VGS和电流处理(流到源电流)之间的关系
MOSFET的热响应是指设备在操作过程中如何处理和消散热量,尤其是由于传导和开关损失。该数字证明,应明智地选择PWM频率,否则要高于的开关速度可以降低驾驶员的效率,这意味着更高的热量产生和更大的热量。
根据IR2104数据表的说法:“ IR2104(S)是高压,高速功率MOSFET和IGBT驱动程序,具有依赖的高和低侧参考输出通道。专有的HVIC和LATCH-immune CMOS技术实现了坚固的整体结构。逻辑输入与标准CMOS或LSTTL输出兼容,低至3.3V逻辑。输出驱动器具有高脉冲电流缓冲阶段,该阶段设计用于驾驶员交叉传导。浮动通道可用于以10到600伏的高度配置驱动N通道功率MOSFET或IGBT。”
销钉上的下拉电阻(R1和R8)是强制性的,因为芯片的内部下拉电阻没有提供“足够强”的下拉点来防止MOSFET的不必要触发(实际上我经历了这一点)。
C1和C10是降低电源噪声的去耦
电容器,D2,D3,D5和D6保护MOSFET免受电动机瞬变和电压尖峰的影响。尽管每个IR3205 MOSFET都有内部反向
二极管,但添加外部Schottky二极管(例如SS36)将增强内部二极管的当前处理并保护它。
REG是SOT-89 78L05调节器,可提供隔离器芯片的不受监管的一侧。 R4和C3构建一个低通
滤波器,以地减少输入噪声。 C6和C8稳定调节器并降低噪声。 D4是SMD 0805
LED,指示正确的电源水平。
根据CA-IS3721数据表:“ CA-IS372X设备是高性能双通道数字隔离器,具有高达3.75KVRMS(窄体封装)和5KVRMS(宽体软件包)隔离等级和超级快速数据速率。 CA -IS372X设备在低功耗下提供高电磁免疫和低排放,同时隔离CMOS数字I/O。每个隔离通道的逻辑输入和输出缓冲液由电容二氧化硅(SIO2)绝缘屏障分隔,并且每个通道输入都与Schmitt Trigger集成,以提供出色的噪声免疫。 CA -IS3720具有两个通道,将数字信号转移到一个方向上,以用于孤立的数字I/O等应用。 CA -IS3721/CA -IS3722设备在每个方向上有2个通道,使其非常适合隔离收发器的TX和RX线,例如RS485,CAN等。当输入要么不供电或开放电路时,对于带有后缀H的设备的设备,默认输出较低。带有后缀H的设备。”
使其适合我们项目的有趣的方面是其低价和对3.3V和5V水平的支持,包括VCC供应和PWM逻辑水平。开关速度可能达到150Mbps。图4显示了芯片的框图。

图4:CA-IS3720芯片的内部框图
PCB布局
图5显示了驱动程序PCB布局。这是一个两层PCB板,所有组件均为SMD。顶层清楚地表明,厚厚的铜平面被吸引以携带大量电流,但请记住,铜的厚度也很重要。为了使该板驱动高电动机,请考虑订购PCB的厚度高于正常的0.35UM FR-4。图6显示了PCB板的组装图。
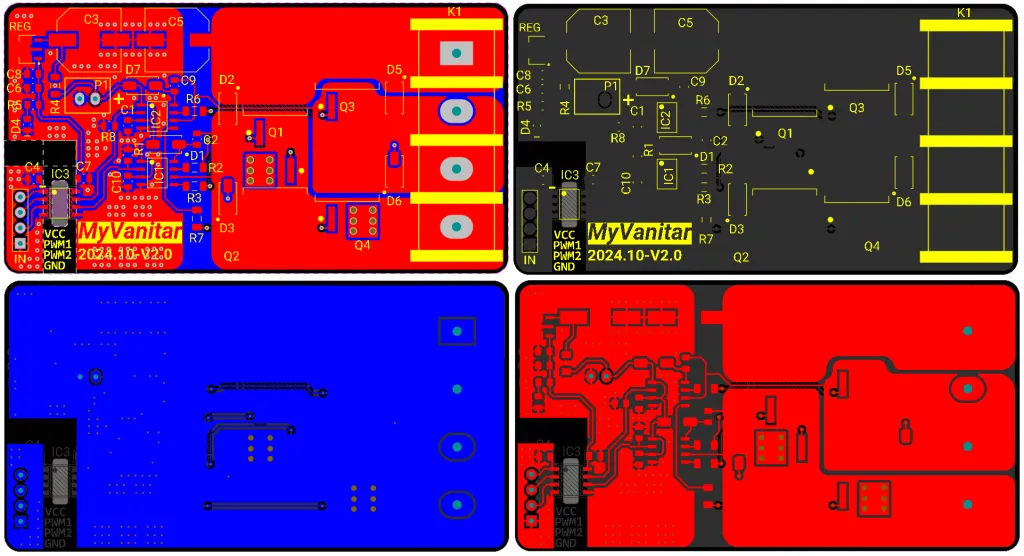
图5:隔离DC电机驱动器的PCB布局
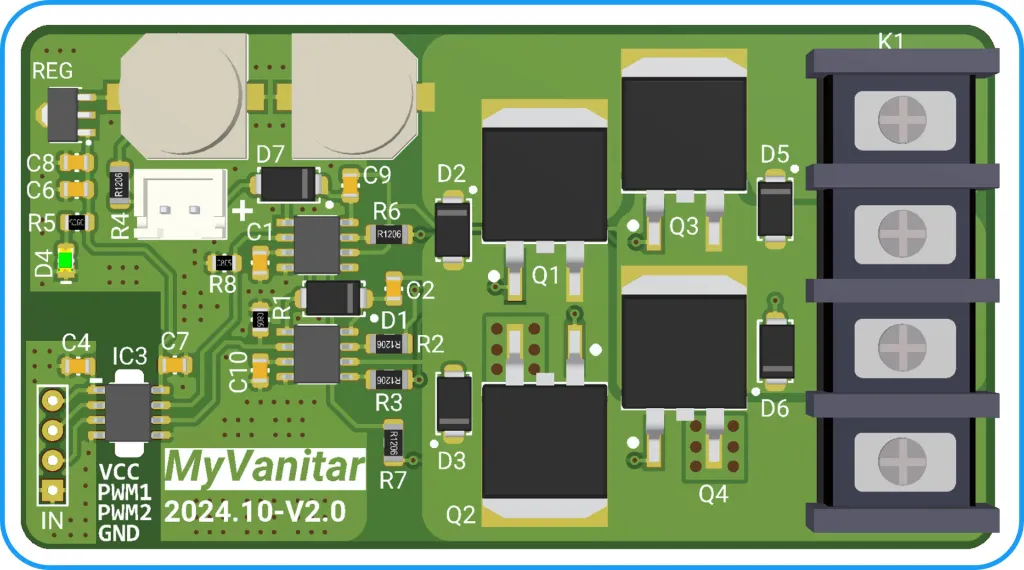
图6:PCB板的组装图
组装和测试
图7显示了组装的PCB板,图8显示了接线图。我使用Arduino Uno板生成PWM信号:50%占空比和500Hz频率。 Arduino的5V输出引脚为隔离侧的VCC提供动力(3.3V至5V)。 PWM占空比定义了电机旋转速度。
板通过在PWM1和PWM2输入之间切换来平稳更改电动机的旋转方向(图9)。请记住,两个PWM输入不得活跃或同时具有PWM脉冲。当输入(浮动)处没有PWM信号时,板不会间歇性或随机运行电动机,这有时会在类似的设计中发生。不要忘记将1UF-100V MKT电容器焊接到电动机或电机连接器上。
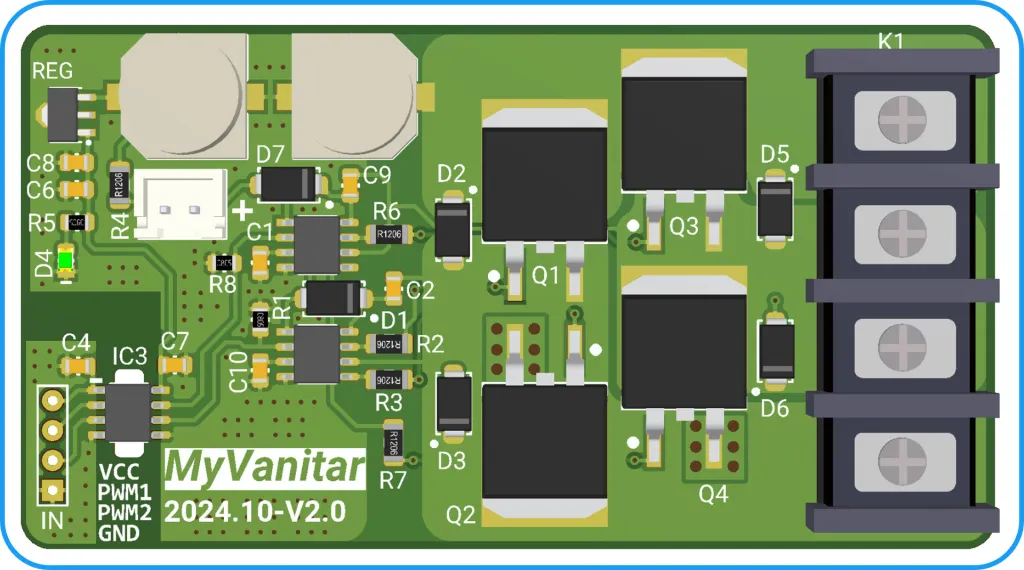
图8:PCB板的接线图。