无
传感器 BLDC 电机控制(有时称为 BLDC 电机的无传感器梯形控制)使用反电动势 (BEMF) 来确定电机转子(电机旋转部分)相对于电机定子(静止部分)的位置。
施加在电机绕组上的电压迫使电机转子转动。然而,转子通过电机磁场的运动类似于发电机的行为,因此电机不仅接收施加的电压,而且还产生自己的电压。该电压称为反电动势或反电动势,它与电机的转速成正比。反电动势可用于确定电机的转子速度和位置——无需传感器。通过反电动势控制电机并不是一项简单的任务。大多数无传感器 BLDC 电机均使用
微控制器、数字信号处理器或专用
驱动器 IC 进行控制。下图显示了典型的无传感器 BLDC
电机驱动器。 典型的无传感器 BLDC 电机驱动
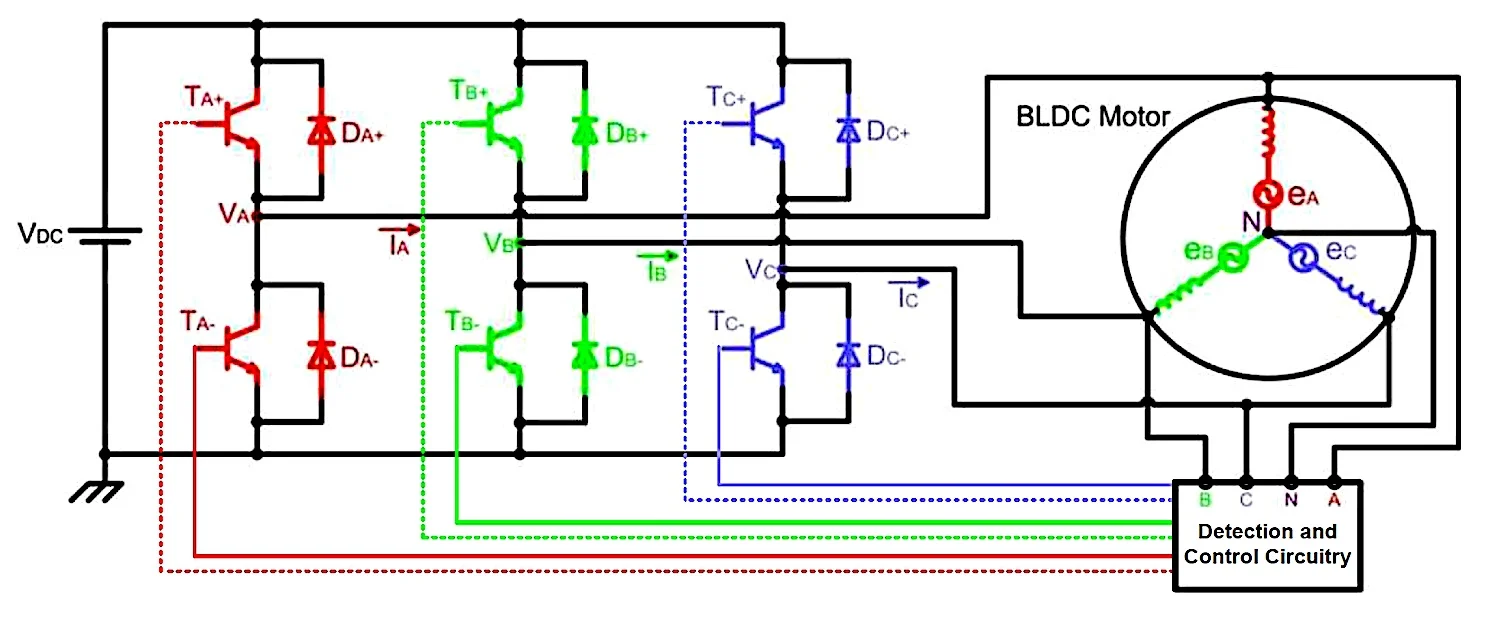
图 4.典型的无传感器 BLDC 电机驱动。
德州仪器 (TI) 的DRV10983是一款三相无传感器电机驱动器,具有集成功率
MOSFET,能够提供高达 2 A 的连续驱动电流。它高度集成,需要很少的外部组件。 TI 的 DRV10983 无传感器 BLDC 电机控制驱动器

图 5. TI 的 DRV10983 无传感器 BLDC 电机控制驱动器。图片由德州仪器 (TI)提供(第 1 页) 。 并非所有无传感器 BLDC 电机控制器都集成了 MOSFET。例如,考虑Allegro 的A4964。该部分需要使用外部N沟道功率MOSFET;它可以与微控制器一起运行,也可以作为独立的单片电机控制器运行。
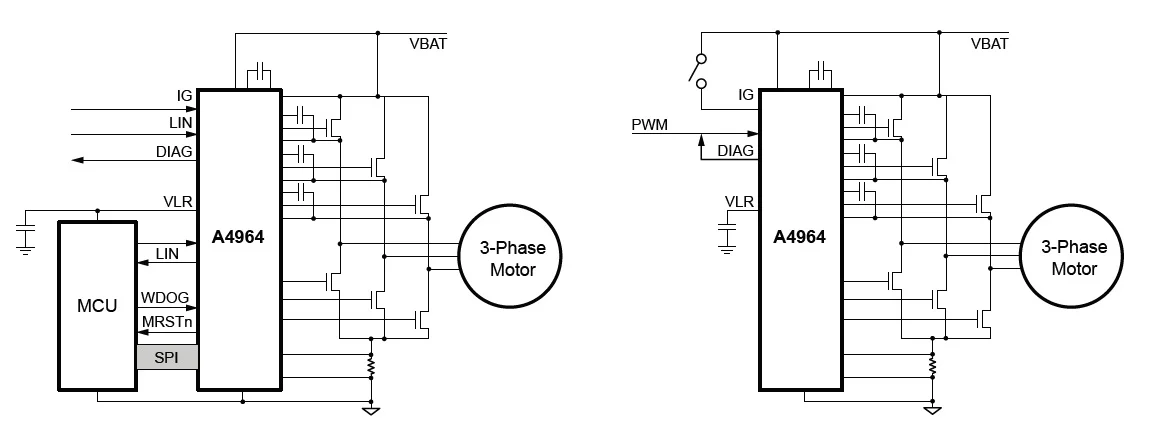
Allegro 的 A4964 无传感器 BLDC 控制器可以与微控制器一起运行,也可以作为独立的电机控制器运行 图 6.Allegro的 A4964 无传感器 BLDC 控制器可以与微控制器一起运行,也可以作为独立的电机控制器运行。
图片取自 A4964数据表。
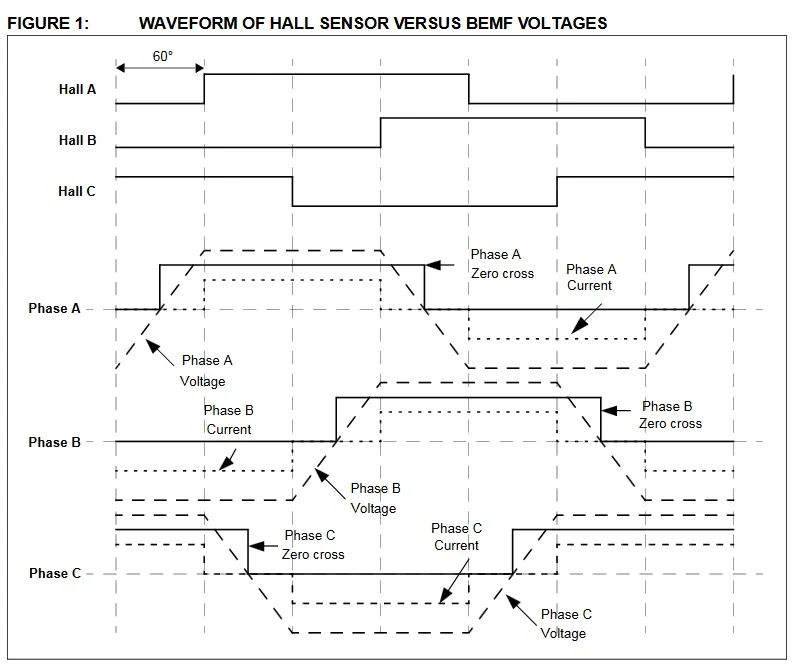
如前所述,在描述无传感器 BLDC 电机控制器时有时会使用梯形一词。当查看下图时,很容易看出原因:电机三个相中每一相的电压波形都具有梯形形状。
Microchip 的 AN970 显示霍尔效应传感器波形和相应的反电动势梯形波形