了解无传感器无刷直流电机控制器、一些示例 IC 以及使用此类电机的一些缺点。
有刷和无刷直流电机的快速回顾
无刷直流 (BLDC) 电机与其前身有刷直流电机相比变得非常流行(见下图)。顾名思义,“有刷”直流电机使用电刷和换向器来控制电机转子的运动。
有刷直流电机使用电刷和换向器
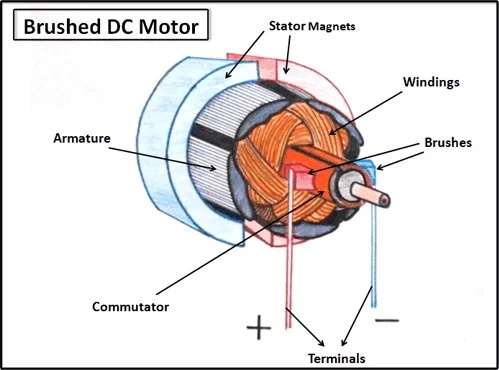
图 1.有刷直流电机使用电刷和换向器。图片由克莱姆森大学提供。
同样,顾名思义,无刷直流电机不使用电刷;电机运动由精心设计的驱动信号控制。与有刷电机相比,无刷电机具有更高的可靠性、更长的使用寿命、更小的尺寸和更轻的重量。BLDC 电机在效率至关重要的应用中变得越来越流行,一般来说,BLDC 电机被认为是一种高性能电机,能够在很宽的速度范围内提供大量扭矩。
一些 BLDC 电机使用霍尔效应传感器来检测电机转子相对于电机定子的位置(参见下面的图 2)。
使用霍尔效应传感器的 BLDC 电机
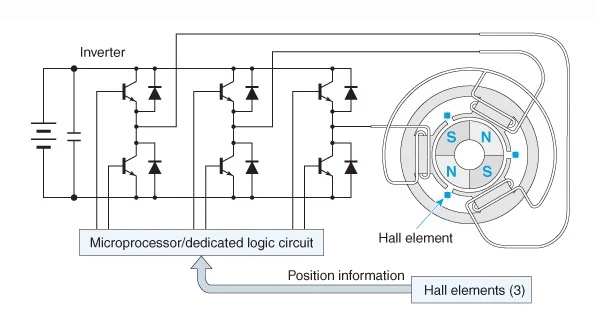
图 2.使用霍尔效应传感器的 BLDC 电机。图片由Nidec.com提供。
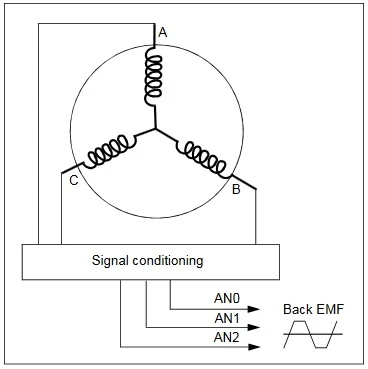
其他电机没有传感器;它们被称为无传感器 BLDC 电机。代替使用霍尔效应传感器来确定转子的位置和/或速度,采用一种称为反电动势的现象(参见下面的图 3)。
使用反电动势的无传感器 BLDC 电机控制
图 3.使用反电动势的无传感器 BLDC 电机控制。图片由 Microchip 提供(第 4 页)。
无传感器 BLDC 电机控制
无传感器 BLDC 电机控制——有时称为 BLDC 电机的无传感器梯形控制——使用反电动势 (BEMF) 来确定电机转子(电机的旋转部分)相对于电机定子(静止部分)的位置。
施加在电机绕组上的电压迫使电机转子转动。然而,转子在电机磁场中的运动类似于发电机的行为,因此电机不仅接收外加电压,还产生自己的电压。该电压称为反电动势或反电动势,它与电机的转速成正比。反电动势可用于确定电机的转子速度和位置——不需要传感器。通过反电动势控制电机不是一项简单的任务;大多数无传感器 BLDC 电机都使用微控制器、数字信号处理器或专用驱动器 IC 进行控制。下图显示了一个典型的无传感器 BLDC 电机驱动器。
典型的无传感器 BLDC 电机驱动
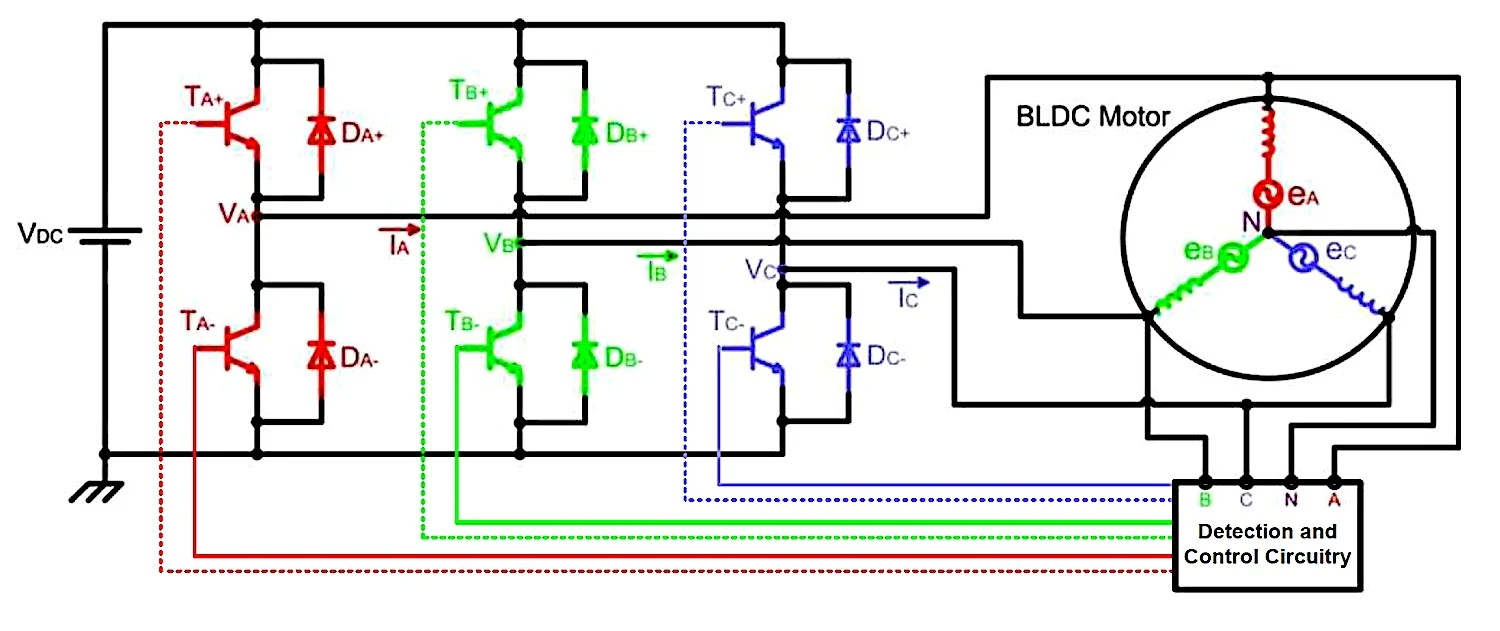
图 4.典型的无传感器 BLDC 电机驱动器。
Texas Instruments 的DRV10983是一款具有集成功率 MOSFET 的三相无传感器电机驱动器,能够提供高达 2 A 的连续驱动电流。它高度集成并且需要很少的外部组件。
TI 的 DRV10983 无传感器 BLDC 电机控制驱动器
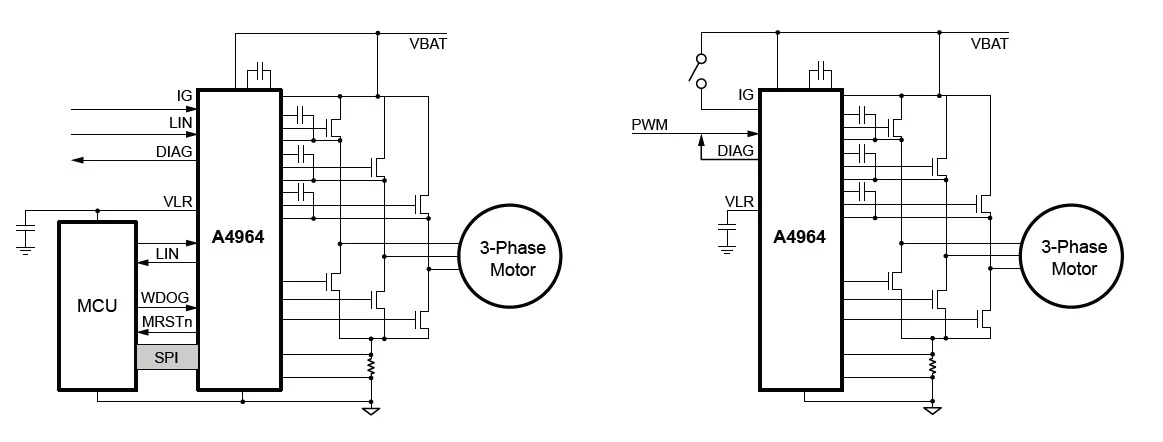
图 5.TI的 DRV10983 无传感器 BLDC 电机控制驱动器。图片由 Texas Instruments 提供(第 1 页)。
并非所有无传感器 BLDC 电机控制器都集成了 MOSFET。例如,考虑Allegro 的A4964。这部分需要使用外部N沟道功率MOSFET;它可以与微控制器一起运行,也可以作为独立的单芯片电机控制器运行。
Allegro 的 A4964 无传感器 BLDC 控制器既可以与微控制器一起运行,也可以作为独立的电机控制器运行
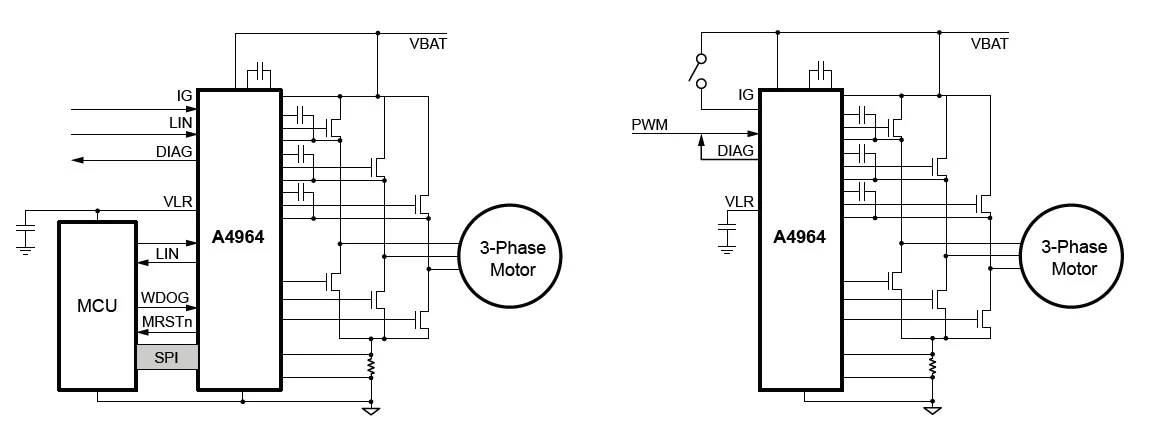
图 6. Allegro 的 A4964 无传感器 BLDC 控制器可以与微控制器一起运行,也可以作为独立的电机控制器运行。图片取自 A4964数据表。
如前所述,在描述无传感器 BLDC 电机控制器时有时会使用术语梯形。当查看下图时,很容易看出原因:电机三相中每一相的电压波形均为梯形。
Microchip 的 AN970 显示霍尔效应传感器波形和相应的反电动势梯形波形
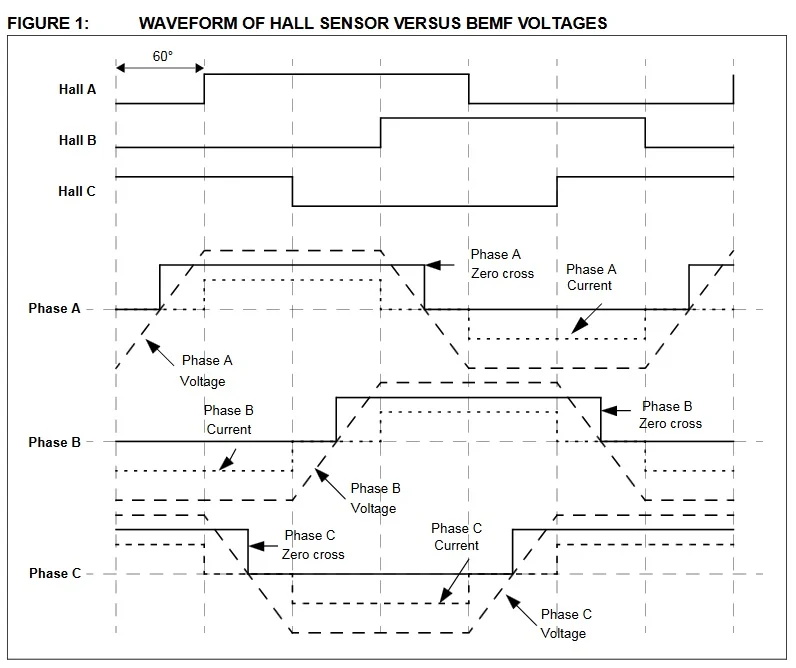
图 7. Microchip 的 AN970 显示了霍尔效应传感器波形和相应的反电动势梯形波形。图片由 Microchip 提供(第 3 页)。
无传感器 BLDC 电机控制器的缺点
当无传感器 BLDC 电机的转子旋转时,其无传感器方案可以完美工作。然而,当电机转子静止时情况并非如此,这导致我们使用无传感器 BLDC 电机的一个主要缺点。当电机的转子不转动时,不会产生反电动势。如果没有反电动势,驱动电路将缺少正确控制电机所需的信息。
对于这个问题,德州仪器 (TI) 提供了两种解决方案,如其 DRV10983 数据表(第 17 页)中所述:
使用 DRV10983 的初始位置检测(IPD) 功能“根据 BLDC 电机中经常出现的确定性电感变化”确定转子位置。
或者,使用align-and-go技术。使用这种方法,在其中一相之间施加电压以迫使转子进行已知对准。
使用无传感器 BLDC 电机的另一个缺点与反电动势和角速度之间的关系有关。较低的速度意味着较少的反电动势,因此霍尔效应 BLDC 电机在低速应用中可能比无传感器 BLDC 电机更有效。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。