霍尔效应开关和锁存器是磁场比较器。它们将磁通密度(有时称为 B 场)与一些预先指定的阈值进行比较,并将比较结果作为 1 位数字值输出。有四种不同类别的数字(开/关)霍尔传感器:单极开关、双极开关、全极开关和锁存器。
我们将详细检查每种类型的传递函数。但是,在此之前,我想澄清一个在我们的讨论中经常使用的重要概念:磁通密度的极性。
我们如何定义 B 场的极性?
霍尔效应设备是定向的。它仅感测沿其灵敏度轴的磁通密度分量。图 1 显示了两种常见霍尔器件封装的灵敏度轴。
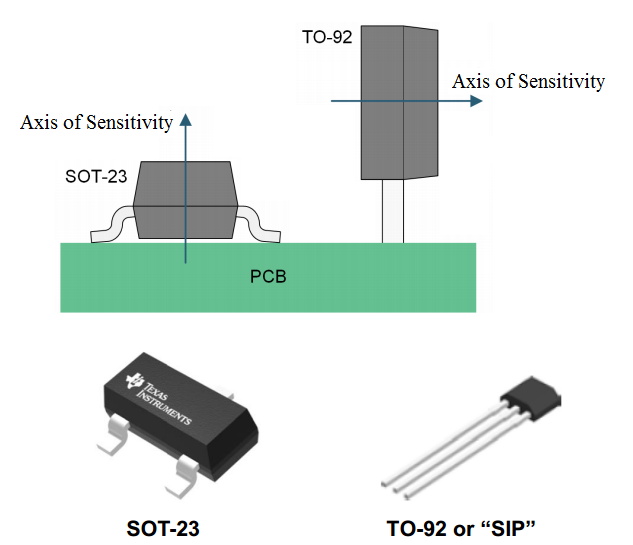
图 1.图片由Texas Instruments提供。
如果施加到设备的磁场在灵敏度轴的方向上产生一个分量,则假定 B 场为正。如果场在灵敏度轴的相反方向上产生一个分量,则假定为负。图 2 显示了一个示例,其中磁通密度在传感器位置 (A) 处具有负极性。
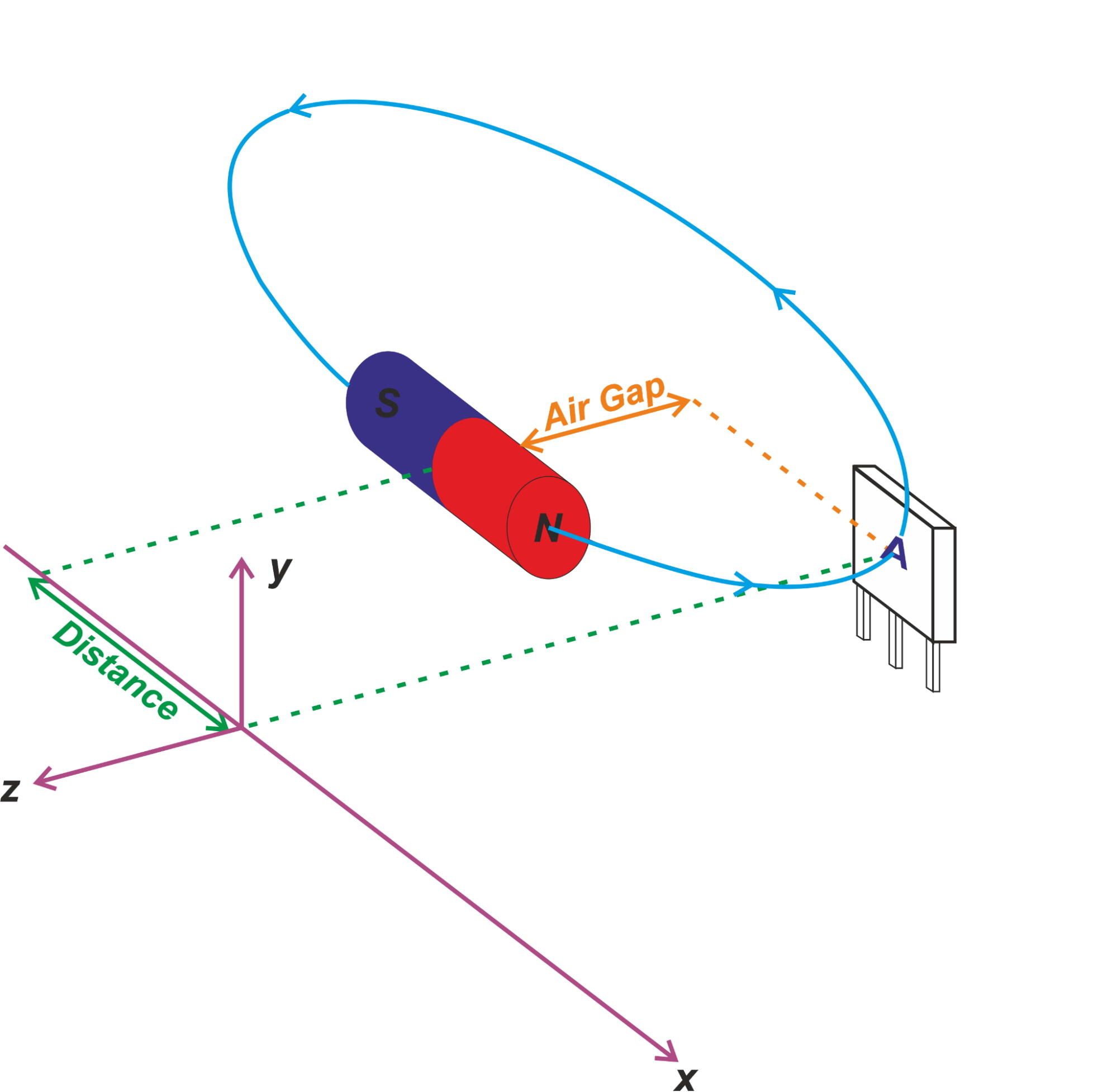
图 2
在上面的例子中,我们假设设备灵敏度轴在 z 轴方向。由于磁铁的磁力线从北极走向南极,因此设备感测到的 B 场为负。
还有一个关于霍尔传感器制造商通常使用的 B 场极性的约定。他们认为磁铁南极产生的磁场为正,北极为负。这是基于传感器的品牌面朝向磁铁的假设。品牌面是传感器的前表面,您可以在其中找到设备部件号等。考虑图 1 中所示的灵敏度轴,您可以验证将磁铁的南极呈现在传感器的品牌面会产生灵敏度轴方向的磁场(正磁场)。同样,北极会产生负磁场。如果我们将磁极呈现在传感器包装的背面(不是包装的品牌面),
结束本次讨论的一点说明:许多霍尔设备是一维的,并且仅沿一个灵敏度轴感测 B 场(如图 1 所示)。但是,有更复杂的传感器 IC,它们采用多个霍尔元件来支持三个灵敏度轴(三维传感器)。现在,让我们检查一下不同类型的数字(开/关)霍尔设备的传递函数。
单极开关
单极开关的功能如图 3 所示。
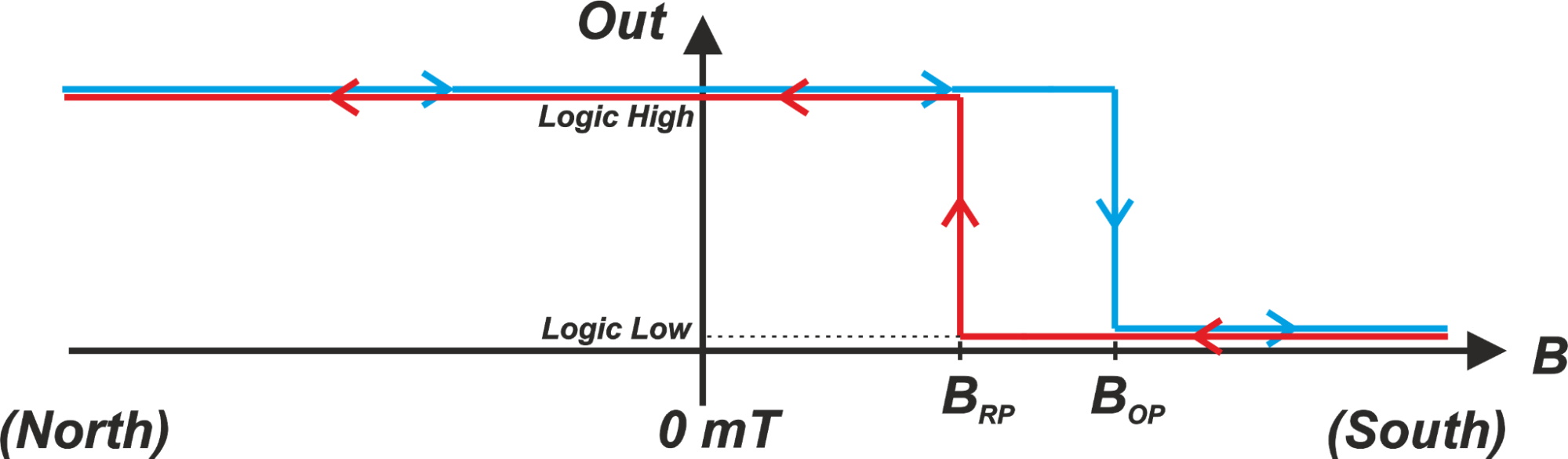
图 3
该器件称为单极开关,因为它的开关阈值(B RP和 B OP)位于磁场轴的正区域。输出状态只能响应南极场而改变。北极或负磁场对传感器没有影响;解释名称“单极开关”。
让我们看看设备如何响应磁场的变化。假设向传感器施加了北极磁场,我们逐渐增加施加的磁场(使其更正)。对于 B < B OP,设备关闭并且输出为逻辑高电平。当施加的磁场变得比阈值 B OP更大(或更正)时,设备开启并且输出切换到相反状态(逻辑低电平)。图中蓝色曲线显示了增加 B 场的传递函数。
激活的设备如何响应减弱的场?对于减小的磁场,器件保持开启状态(逻辑低电平),直到施加的磁场变得小于 B RP。这由上图中的红色曲线显示。对于 B < B RP,器件关闭并且输出变为逻辑高电平。
因此,增加磁场的开关阈值不同于减少磁场的开关阈值。这种迟滞是有意设计的,以便在输出端实现干净的切换。霍尔效应传感系统中的机械振动以及电气和电磁噪声会将噪声引入传感磁场。阈值水平附近的 B 场噪声会导致霍尔传感器输出端出现不确定的、快速变化的波动(图 4)。通过使增加和减少字段的阈值略有不同,可以消除这些不需要的波动。
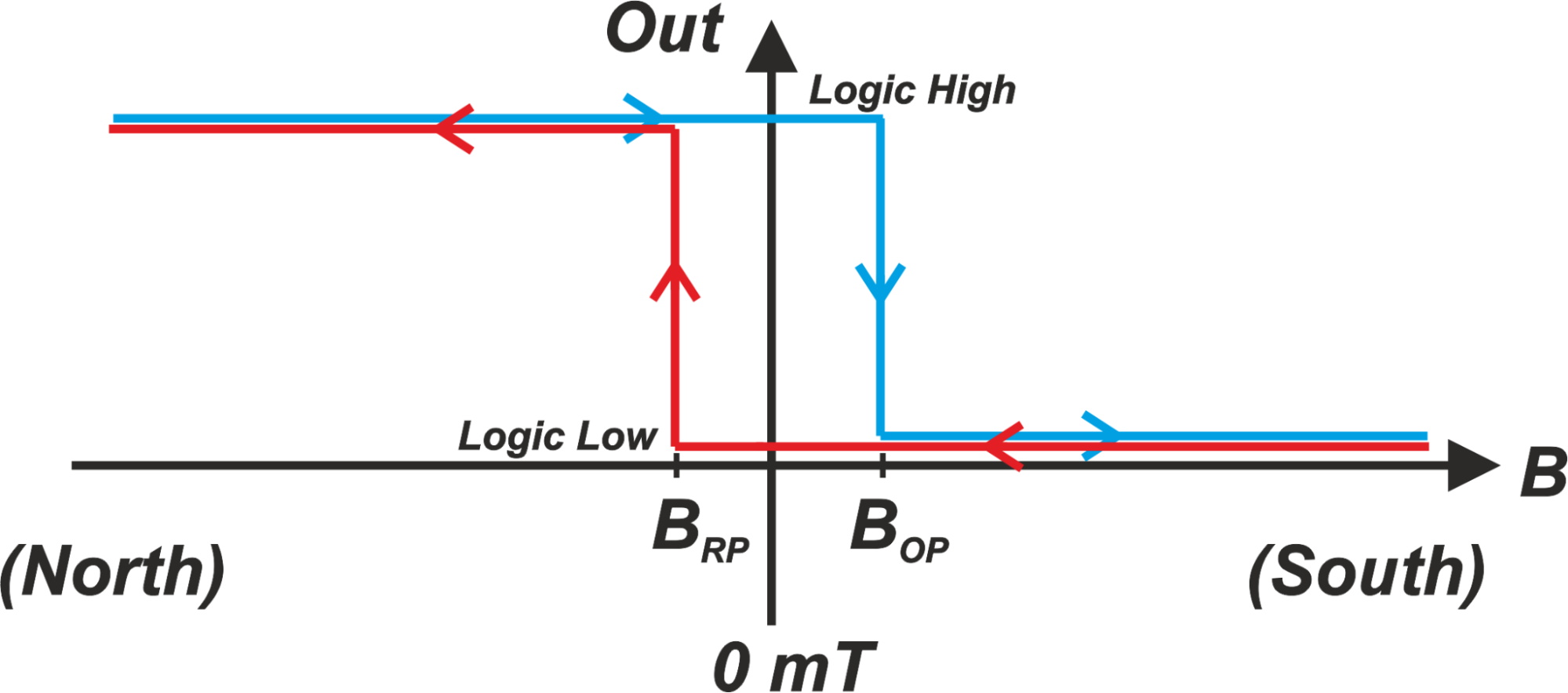
图 4.没有滞后,输出在阈值附近可能不确定。
正如我们在上面看到的,单极开关的操作可以用两个不同的参数来描述:B OP和 B RP。B OP代表“磁性操作点”或简称为“操作点”。这表示增加磁场的阈值水平,超过该阈值传感器将开启。B RP是“磁性释放点”或简称为“释放点”。它表示磁场减弱的阈值水平。对于 B < B RP,设备关闭。滞后由 B HYS表示,由下式给出:
B HYS = B OPB RP
我们将在下面讨论类似的符号可用于描述其他类型的数字霍尔设备的操作。
请注意,根据传感器电子设计,传感器输出的开启和关闭状态可能与图 3 中描述的相反(设备关闭时为逻辑低电平,设备开启时为逻辑高电平)。
双极开关
全极开关的传递函数如图 5 所示。
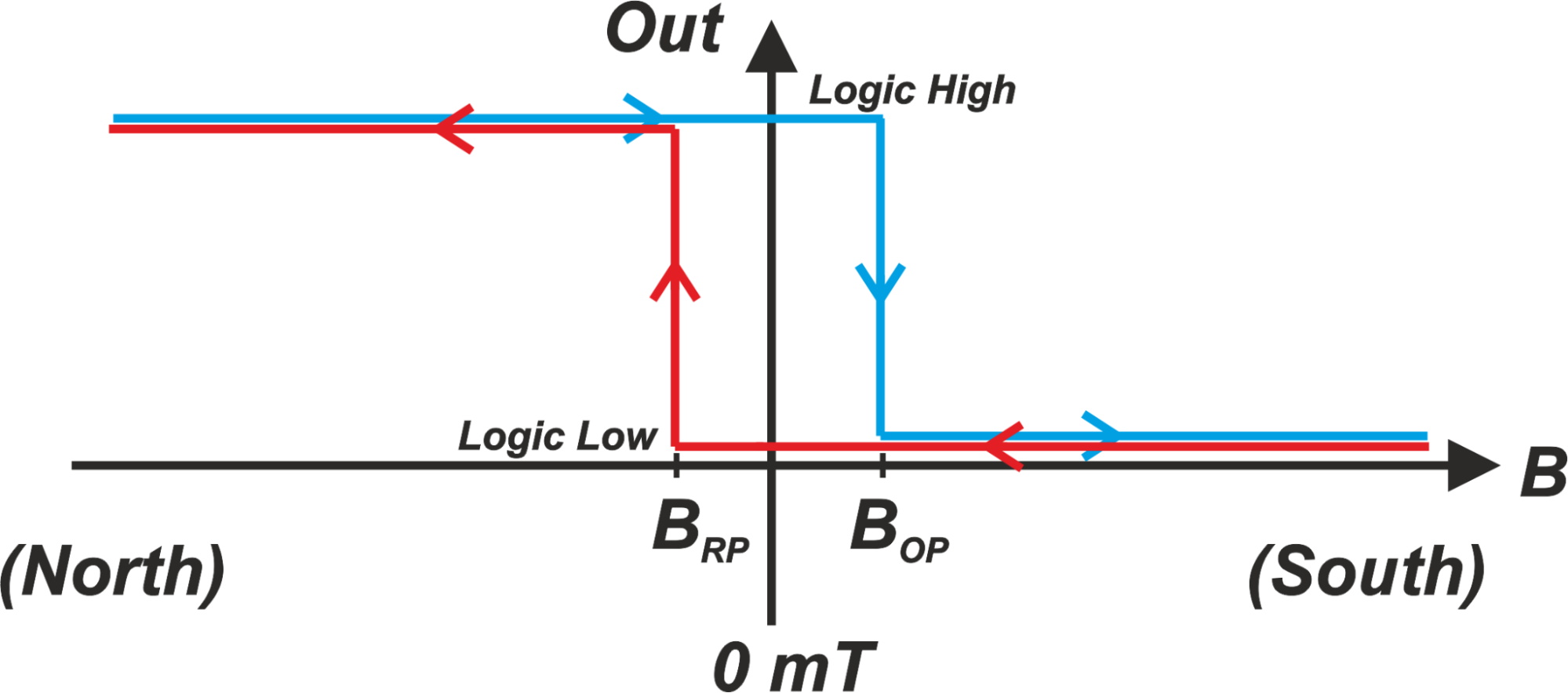
图 5
全极开关在强正磁场或强负磁场的作用下导通。如图所示,当磁场强度大于 B OP (|B| > B OP ) 时,器件开启,输出变为逻辑低电平。当 B 场的大小变得小于 B RP (|B| < B RP),传感器关闭,输出变为逻辑高电平。蓝色曲线显示当 B 场从较大的负值变为较大的正值时的传感器输出。红色曲线显示 B 场递减的输出。对于全极开关,正负 B 场的工作点大小相同。类似地,南极和北极场的释放点幅度相同。
霍尔效应锁存器
霍尔效应锁存器的传递函数如图 6 所示。
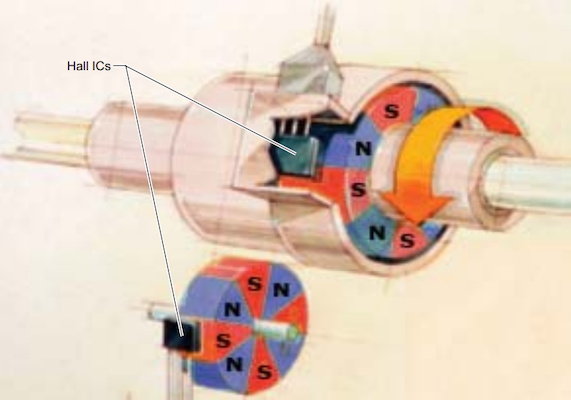
图 6
闩锁装置具有正 B OP和负 B RP。它由足够大的正磁场 (B > B OP )打开,并在存在足够强的北极磁场 (B < B RP )时关闭。器件滞后包括 B=0 附近的区域,范围从 BRP 到BOP. 我们知道设备不会在滞后区域改变状态。假设我们应用足够强的正磁场来激活传感器。如果我们移除这个磁场,设备将感应到 B=0 的磁场。尽管传感器没有施加任何场,但它会保留其先前的状态并保持开启状态。如果我们应用具有相反极性的强场,它只会改变状态。当向传感器施加弱磁场时 (B RP < B < B OP ),传感器将保留其先前产生的输出。这就解释了为什么这个霍尔器件被称为锁存器。
单极或全极开关可以随着施加场的幅度变化而改变状态,而锁存器可以感测 B 场的极性(前提是施加场具有足够的强度)。锁存器通常与旋转应用中的环形磁铁一起使用,例如用于检测旋转轴的位置。如图 7 所示。
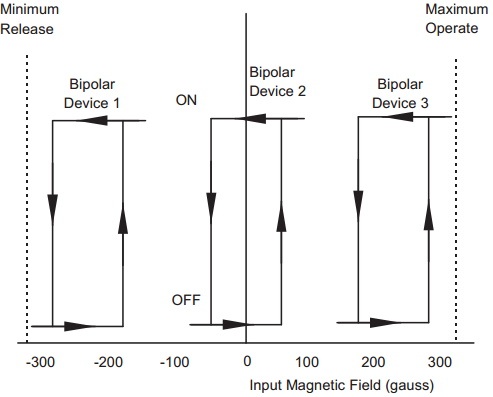
图 7.图片由Allegro提供。
随着轴的旋转,感测磁场的极性发生变化,传感器相应地打开/关闭。对于闩锁装置,操作点和释放点大小相等但极性相反 (B OP ≠ -B RP )。
双极开关
对于双极开关,我们只知道“”操作点和“”释放点的值。然而,确切的阈值是未知的。因此,设备的确切操作可能会因设备而异。图 8 显示了一个示例,其中 B OP约为 300 高斯, B RP约为 -300 高斯。
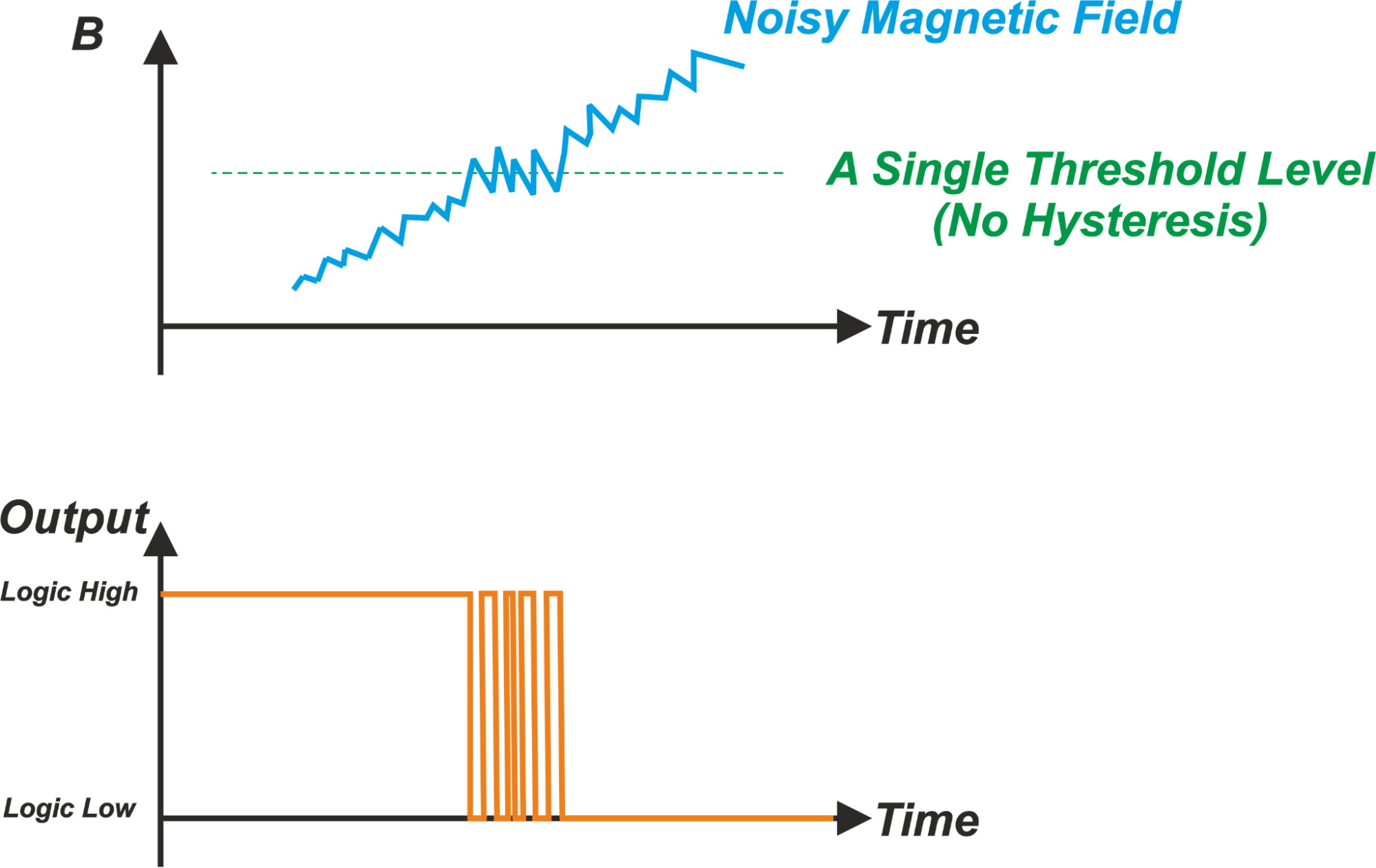
图 8.图片由霍尼韦尔提供。
对于“器件 1”,B OP和 B RP均为负。对于“设备 3”,两个阈值都是正的。另一个样本“设备 2”的响应类似于锁存器。它具有正 B OP和负 B RP。尽管“设备 2”的传递函数类似于锁存器的传递函数,但应注意双极开关的操作点和释放点的幅度可能不相等 (B OP - B RP )。
如您所见,即使对于在同一批次中一起制造的相同类型的设备,也可能存在三种不同的传递函数。根据 Allegro 的“双极开关霍尔效应 IC 基础知识”应用说明,只有大约 10% 的双极开关具有类似于“器件 1”和“器件 3”的传递函数。其余的具有闩锁型响应。与锁存器件相比,双极开关可以提供更窄的滞后区 (B HYS = B OP ? B RP ),因此具有更高的灵敏度。但是,由于双极开关的工作模式会因单元而异,因此我们需要确保系统在 B OP 和 B 的所有可能值下都能正常运行RP(在指定的范围限制内)。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。