霍尔效应开关和锁存器是磁场比较器。它们将磁通密度(有时称为 B 场)与一些预先指定的阈值进行比较,并将比较结果作为 1 位数字值输出。数字(开/关)霍尔传感器有四种不同类别:单极开关、双极开关、全极开关和锁存器。
我们将详细研究每种类型的传递函数。但是,在此之前,我想澄清一个在我们的讨论中常用的重要概念:磁通密度的极性。
我们如何定义 B 场的极性?
霍尔效应器件是有方向性的。它仅感测沿其敏感轴的磁通密度分量。图 1 显示了两种常见霍尔器件封装的灵敏度轴。
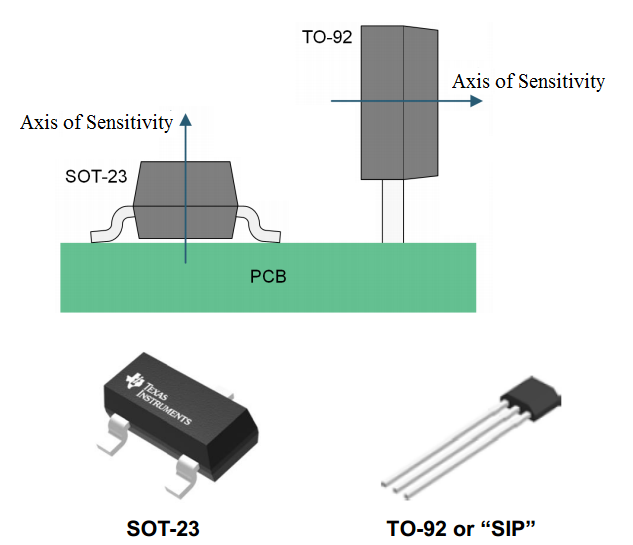
图 1.图片由德州仪器 (TI)提供。
如果施加到设备的磁场在灵敏度轴方向上产生分量,则假定 B 场为正。如果磁场产生与灵敏度轴相反方向的分量,则假定该分量为负。图 2 显示了传感器位置 (A) 处磁通密度具有负极性的示例。
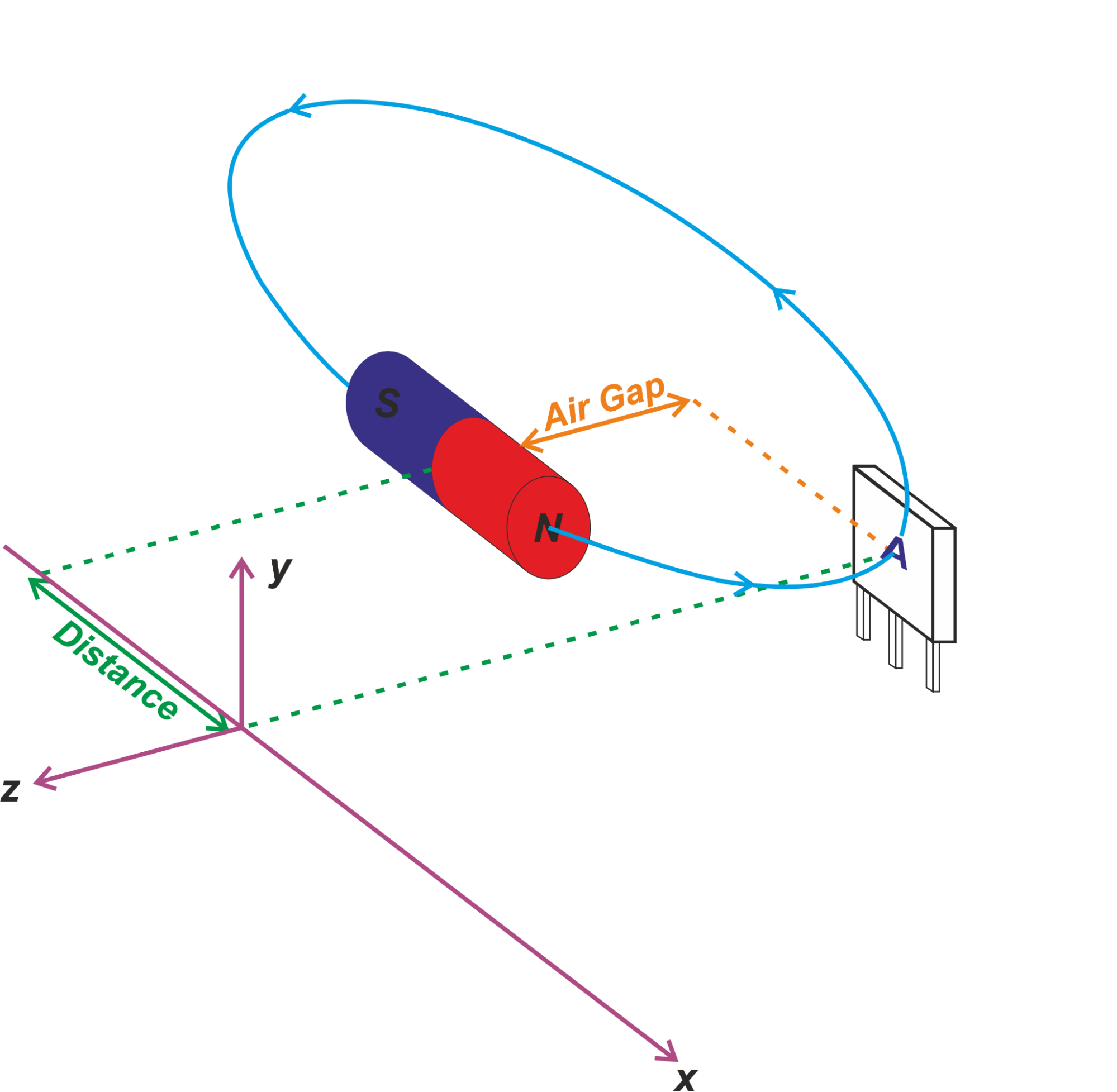
图2
在上面的例子中,我们假设设备灵敏度轴在z轴方向。由于磁体的磁力线从北极到南极,因此设备感测到的 B 场为负。
霍尔传感器制造商还普遍使用有关 B 场极性的约定。他们认为磁铁南极产生的磁场为正,北极产生的磁场为负。这是基于传感器的标记面朝向磁铁的假设。品牌面是传感器的前表面,您可以在其中找到设备部件号等。考虑到图 1 中所示的灵敏度轴,您可以验证将磁体的南极呈现到传感器的品牌面会产生敏感轴方向的磁场(正磁场)。同样,北极会产生负磁场。如果我们将磁极置于传感器封装的背面(而不是封装的品牌面),则上述约定将不再有效!
结束本次讨论的一点是:许多霍尔器件都是一维的,并且仅沿一个敏感轴感应 B 场(如图 1 所示)。然而,还有更复杂的传感器 IC,它们采用多个霍尔元件来支持三个灵敏度轴(三维传感器)。现在,让我们检查不同类型的数字(开/关)霍尔器件的传递函数。
单极开关
单极开关的功能如图 3 所示。
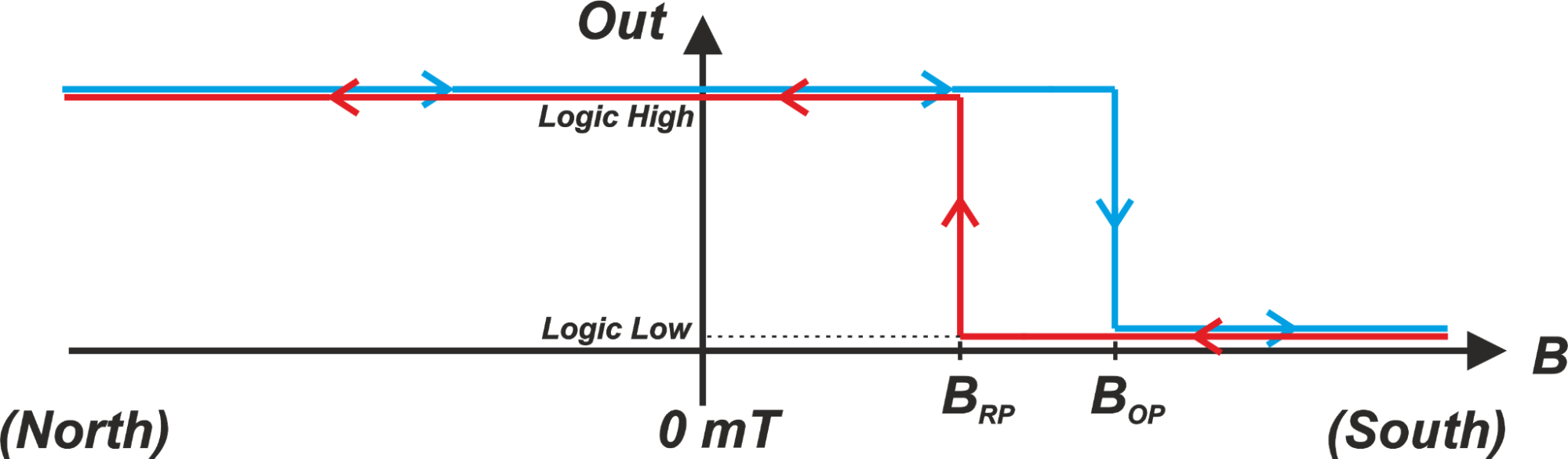
图3
该器件被称为单极开关,因为其开关阈值(B RP和B OP)位于B场轴的正区域。输出状态只能响应南极场而改变。北极或负磁场对传感器没有影响;解释“单极开关”这个名称。
让我们看看该设备如何响应磁场的变化。假设向传感器施加北极磁场,并且我们逐渐增加施加的磁场(使其更正)。当 B < B OP时,器件关闭且输出为逻辑高电平。当施加的磁场变得比阈值 B OP更大(或更正)时,器件开启并且输出切换到相反状态(逻辑低)。图中蓝色曲线显示了 B 场增加的传递函数。
激活的设备如何响应减弱的磁场?对于减小的磁场,器件保持开启状态(逻辑低电平),直到施加的磁场变得小于 B RP。这如上图中的红色曲线所示。当 B < B RP时,器件关闭且输出变为逻辑高电平。
因此,增加磁场的切换阈值不同于减少磁场的切换阈值。这种迟滞是特意设计的,目的是在输出端实现干净的切换。霍尔效应传感系统中的机械振动以及电气和电磁噪声可能会将噪声引入到传感磁场中。阈值水平附近的 B 场噪声可能会导致霍尔传感器输出出现不确定、快速变化的波动(图 4)。通过使增加场和减少场的阈值稍微不同来消除这些不需要的波动。
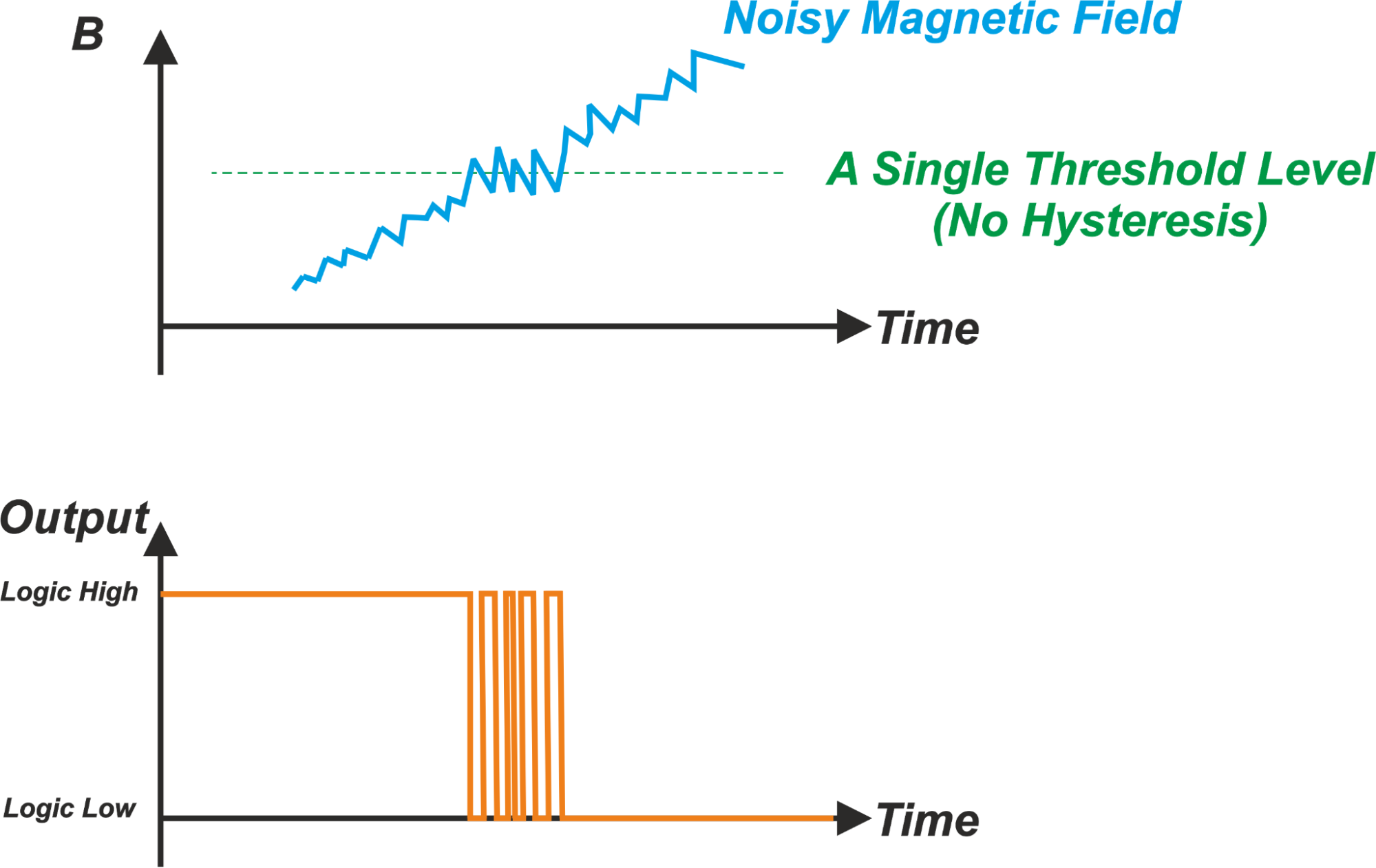
图 4.如果没有迟滞,输出可能在阈值附近不确定。
正如我们在上面看到的,单极开关的操作可以通过两个不同的参数来描述:B OP和B RP。 B OP代表“磁操作点”或简称“操作点”。这表示磁场增加的阈值水平,超过该阈值传感器就会打开。 B RP是“磁性释放点”或简称“释放点”。它表示磁场减弱的阈值水平。对于 B < B RP,设备关闭。迟滞由 B HYS表示,其计算公式为:
B HYS = B OP – B RP
我们将在下面讨论类似的符号可用于描述其他类型的数字霍尔器件的操作。
请注意,根据传感器电子设计,传感器输出的开和关状态可能与图 3 中所示的相反(设备关闭时逻辑低,设备开启时逻辑高)。
全极开关
全极开关的传递函数如图 5 所示。
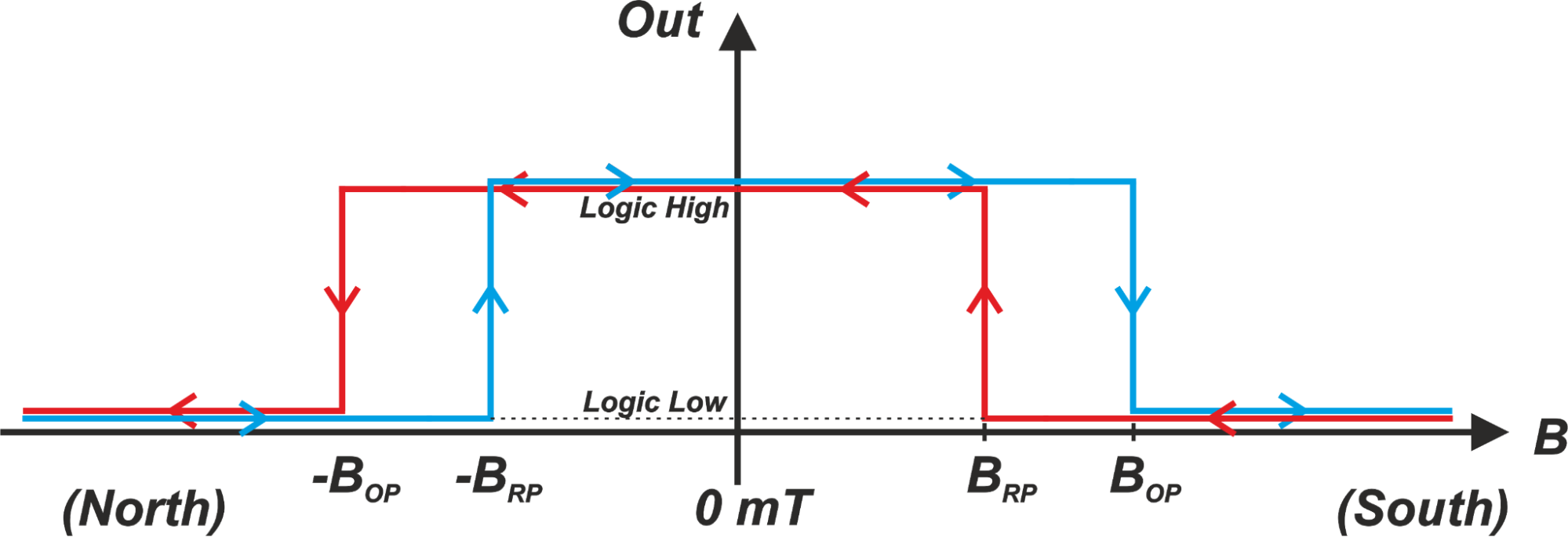
图5
全极开关在强正磁场或强负磁场下导通。如图所示,当磁场强度大于 B OP (|B| > B OP ) 时,器件开启且输出变为逻辑低电平。当 B 场的强度变得小于 B RP (|B| < B RP ) 时,传感器关闭且输出变为逻辑高电平。蓝色曲线显示 B 场从大负值变为大正值时的传感器输出。红色曲线显示 B 场递减的输出。对于全极开关,正 B 场和负 B 场的工作点大小相同。类似地,南北极场的释放点震级是相同的。
霍尔效应锁存器
霍尔效应锁存器的传递函数如图 6 所示。

图6
锁存器装置具有正B OP和负B RP。它在足够大的正磁场 (B > B OP )时开启,并在存在足够强的北极磁场 (B < B RP ) 时关闭。器件滞后包括 B=0 周围的区域,范围从 BRP 到 B OP。我们知道器件在迟滞区域不会改变状态。假设我们施加足够强的正磁场来激活传感器。如果我们移除这个磁场,设备将感应到 B=0 的磁场。尽管没有向传感器施加磁场,但它将保留其之前的状态并保持开启状态。只有当我们施加相反极性的强场时,它才会改变状态。当向传感器施加弱磁场时 (B RP < B < B OP ),传感器保留其先前产生的输出。这就解释了为什么这种霍尔器件被称为锁存器。
虽然单极或全极开关可以随着所施加场的幅度变化而改变状态,但锁存器可以感测 B 场的极性(假设所施加的场具有足够的强度)。在旋转应用中,闩锁通常与环形磁铁一起使用,例如用于检测旋转轴的位置。
当轴旋转时,感测磁场的极性发生变化,传感器相应地打开/关闭。对于闩锁装置,操作点和释放点大小相等,但极性相反 (B OP ≠ -B RP )。
双极开关
对于双极开关,我们只知道“”工作点和“”释放点的值。然而,确切的阈值尚不清楚。因此,设备的具体操作可能会因单元而异。图 8 显示了一个示例,其中 B OP约为 300 高斯, B RP约为 -300 高斯。
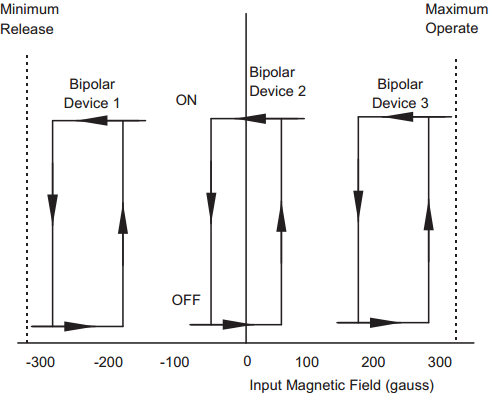
图 8.图片由霍尼韦尔提供。
对于“设备1”,B OP和B RP均为负。对于“设备 3”,两个阈值均为正值。另一个示例“设备 2”具有与锁存器类似的响应。它具有正 B OP和负 B RP。尽管“设备 2”的传递函数类似于锁存器的传递函数,但应注意,双极开关的操作点和释放点的大小可能不相等 (B OP - B RP )。
正如您所看到的,即使对于在同一批次中一起制造的相同类型的设备,也可以使用三种不同的传递函数。根据 Allegro 的“双极开关霍尔效应 IC 基础知识”应用说明,只有约 10% 的双极开关具有与“器件 1”和“器件 3”类似的传递函数。其余的具有锁存型响应。与锁存器件相比,双极开关可以提供更窄的滞后区 (B HYS = B OP – B RP ),因此具有更高的灵敏度。然而,由于双极开关的操作模式可能会因单元而异,因此我们需要确保系统对于 B OP和 B RP的所有可能值(在指定的范围限制内)都能正常运行。