步进电机通过以小的增量旋转来在高精度应用中提供旋转运动。这些电机需要称为电机驱动电路的控制电路 来控制电机绕组中传递的电压和电流,从而控制旋转的速度和位置。本文将重点介绍步进电机驱动电路及其在各种应用中的工作原理。
步进电机驱动电路
步进电机驱动电路有不同类型,包括:
全步驱动电路
全步驱动电路是简单的步进电机驱动电路。它们向步进电机的绕组提供全步电流,导致每个电脉冲移动一步。该驱动器主要将电流方向交替到步进电机的两相。
这种类型的驱动电路包括每个绕组的四个开关。开关可以是固态器件,例如双极晶体管或MOSFET,或机械继电器。开关配置为桥式布置,电机绕组的每一侧都有两个开关。
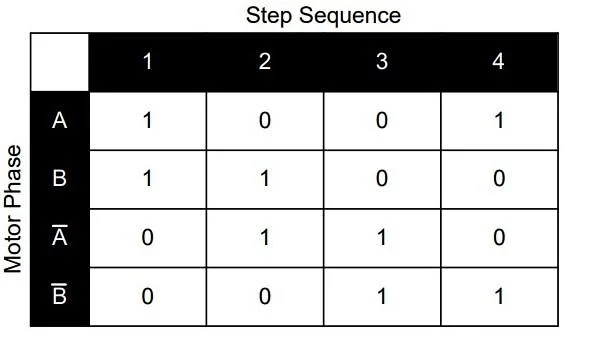
图 1.全步操作的逻辑表。图片由 Bob Odhiambo 提供
为了使电机旋转,开关按照特定的顺序断开和接通,如图 1 所示。为了使电机旋转,可以将开关配置为电机 A 相的以下切换。
开关1和4接通,而3和2断开,使得电流仅流过A相的和第四电机绕组,从而产生将转子拉向该侧的磁场。
在换向开关中,2 和 3 开启,而 1 和 4 关闭,以允许电流仅流过 2 和 3,从而产生将转子拉向另一侧的磁场。
相同的过程发生在 B 阶段,步骤顺序如图 1 所示。该过程会重复进行,以实现电机的连续旋转运动。
全步驱动器可产生的扭矩和的振动,但该组件的局限性在于它提供了所有驱动电路中的分辨率。在全步操作模式下,电机的A相和B相同时激活,从而提供相对于波驱动的吸引力,同时保持波驱动方法的分辨率恒定。全步序列中的每一步都会使电机以定义的角距离旋转。
半步驱动电路
半步驱动电路通过使用微步进方式将电流方向交替到步进电机的两相和中心抽头来给出中间分辨率。所有这些的结果是定位更加准确。
这种类型的步进电机驱动器操作步进电机以半步增量旋转。这种驱动器通常用于需要控制电机速度和位置的领域。
半步驱动电路使用晶体管来控制电机绕组中流动的电流。每个绕组有一对晶体管来关闭或打开电流。开关由控制电路或微控制器控制,控制电路或微控制器发送脉冲来驱动电机。
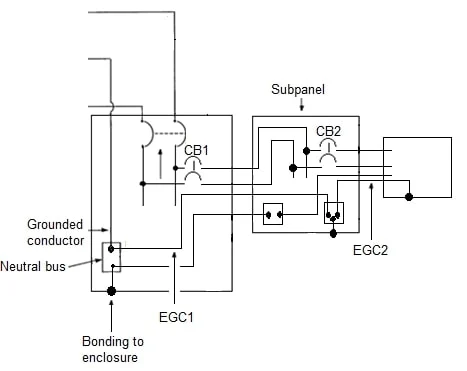
图 2.半步驱动电路的电机
线圈序列。图片由德州仪器 (TI) 提供
半步驱动电路分为两级;半步和全步。如上图 2 所示,步骤 3 是线圈序列的全步骤,而步骤 2 是全步骤的一半。
在半步阶段,电机每从驱动电路接收到一个脉冲,就会旋转半步,如图 2 中的步骤 2 所示。在此过程中,首先给一个绕组通电,然后同时通电,如此重复以相反的顺序。此序列导致朝一个方向旋转半步,然后旋转至其原始位置,旋转至另一侧半步。
微步进驱动电路
微步进电机驱动电路以小增量控制电机以确保精度。这种精细的控制是通过逐渐控制流经电机绕组的电流来实现的。电流控制使用先进的算法,以正弦波形驱动电机,而不是像简单驱动那样使用简单的方波。正弦波形由微控制器生成,用于调整电机的速度和位置。生成的波形作为信号发送到驱动器。
该驱动器的主要优点是电机运动控制的增量。然而,微步驱动器会出现一些问题,即缓慢衰减。慢衰减是电机绕组中流动的电流随着驱动信号的变化而缓慢衰减的现象。这反过来会导致电机失去扭矩,甚至错过一些步骤。多种因素会导致缓慢衰减,例如电机绕组的电阻和电感。为了缓解这个问题,有源电流调节控制初始绕组,以确保快速、平滑的延迟。
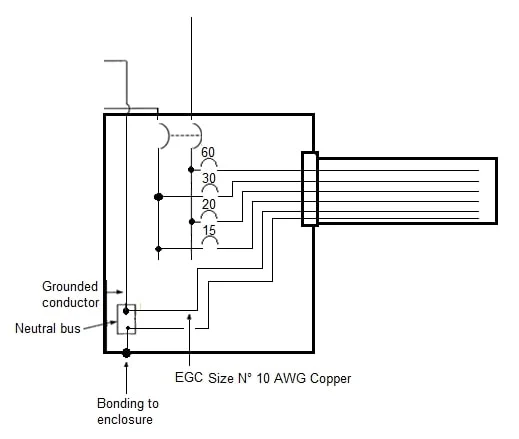
图 3.显示了步进电机的两个相位中的缓慢衰减和混合衰减如何与 8 微步操作周期中的步进输入相互作用。图片由 Bob Odhiambo 提供
解决缓慢衰减的另一种方法是混合衰减。该方法结合了快速衰减和慢速衰减,以实现的电机性能。电机绕组中的电流随着驱动信号方向的变化而快速衰减。电流在短时间内保持在较低水平,以提高电机的保持扭矩。