电机的典型驱动方法主要有电压驱动、电流驱动以及 PWM 驱动这几种。本文将着重介绍采用 PWM 驱动方式实现电机恒流工作的相关内容,包括什么是 PWM 驱动的电机恒流工作,以及该工作模式下电路的具体工作原理。
当我们以恒定的电流驱动电机时,电机能以恒定转矩旋转。电机的转矩计算公式为转矩常数乘以电机电流,这表明电机转矩与电流成正比关系。所以,只要电流恒定,转矩也就恒定。
首先,我们来看图 1,它展示了一个通过 PWM 驱动以恒定电流工作的电路示例。这是一个带有 4 个开关(在本示例中使用了 MOSFET 的 H 桥作为输出段)的电机驱动器电路。关于 H 桥的更多信息,可查阅 Tech Web Motor 的基础知识。
PWM 驱动的基本原理是通过脉冲的 ON/OFF 来发送所需功率。脉冲的大小(电压)和周期是固定的,通过调整 ON 时的脉冲宽度(时间)来控制要发送的功率。详细信息同样可参考 Tech Web Motor 的基础知识。
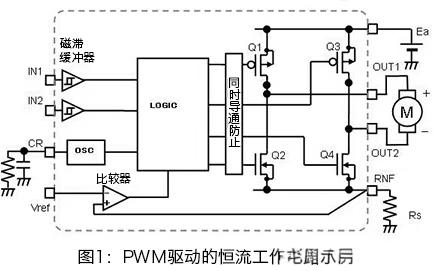
图 1 是以电机正转为前提的。在这种情况下,对于 MOSFET Q1 和 Q2,Q1 导通,Q2 关断,OUT1 连接到电源电压 Ea,电流从电源流向电机的正极。同时,对于 Q3 和 Q4,Q3 关断,Q4 导通,OUT2 经由驱动器 RNF 引脚的 Rs 连接到 GND,从而形成完整的电流回路,使电机处于通电状态。
由于我们的目标是实现电机的恒流工作,因此需要对电流进行控制,这一任务由 Rs 和比较器共同完成。Rs 是电流检测电阻,比较器的作用是将 Rs× 电机电流所产生的电压与施加到基准电压引脚 Vref 的基准电压进行比较。我们将基准电压设置为所需的恒定电流值 ×Rs。
当电机通电后,电流会逐渐增大。当 Rs 的检测电压超过 Vref 时,比较器会将 Q1 关断(Q2 可保持关断,也可导通),停止给电机通电。当停止通电时,电机的电流会由于电感的作用试图继续流动,但会逐渐减小。一定时间后,当 Q1 再次导通、电机重新通电时,电机的电流又开始增大。当 Rs 的检测电压再次超过 Vref 时,Q1 再次关断,停止通电。如此循环往复。
图 1 中的驱动器会对 OSC(振荡器)的频率进行计数,并已设置了任意的关断时间(toff)。其工作波形如图 2 所示。
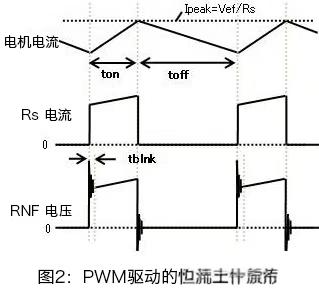
通过这种重复动作,电机中会流过以 Vref 除以 Rs 得到的电流值为顶点的三角波电流。如果将 Q1 的关断时间(toff)设置得足够小,电机就能够以几乎恒定的电流工作,即实现恒流工作。
然而,在实际的 PWM 驱动过程中,还需要进行更精细的控制。例如,在停止通电、再生电流流动期间,Rs 中没有电流流过,因此当重新通电时 Rs 中的电流变化会变大。由于电路中不可避免地存在寄生电感,这种电流的导通和关断可能会导致 RNF 引脚产生如图 2 所示的较大电压噪声,或者流过对 MOSFET 的寄生电容进行充电的电流并导致超过 Vref 电压。为了防止这些电压噪声引起的误关断动作,需要在 PWM 驱动上采取相应的措施,如忽略短时间的峰值电流并设定不反应的时间(tblnk),或者用滤波器来滤除 PWM 驱动噪声等。