该算法的个组成部分是拥有一个可以接受前馈项作为第三个输入的速度控制器。图 2 来自 SciLab 仿真,显示了如何实现具有前馈的速度控制器:
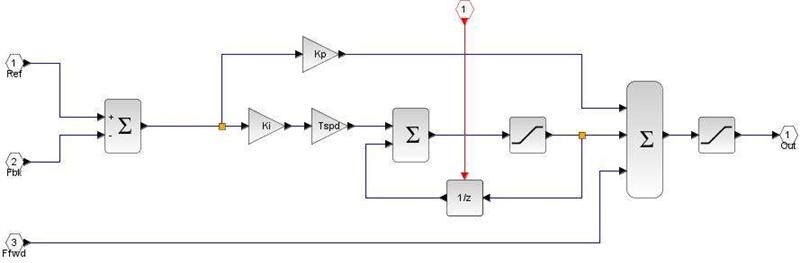
图 2:实施前馈的速度控制器()
可以看出,输入 Ffwd 一直到终求和点,为速度控制器提供额外的帮助,独立于速度参考值和速度反馈。
自动负载学习
该算法能够根据两个输入动态学习负载曲线:
电角度信息: 尽管内部需要机械角度,但它不必像第 1 部分中概述的传统方法那样相对于机械位置对齐。机械角度范围的要求是它需要覆盖整个机械旋转,无论其相对于机械轴的对准如何。在此算法的特定实现中,使用电角度作为输入并考虑
电机的极数,在模块内计算机械角度。这是假设存在同步电机的情况。如果控制异步电机(即感应电机),则模块内部完成的机械角计算需要考虑滑差。
测量的电流值: 在 FOC 的情况下,Iq 负责电机的扭矩。
图 3 显示了该块的输入:
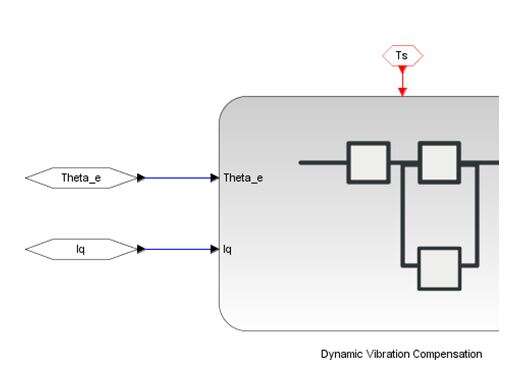
图 3:动态振动补偿模块输入()