控制系统工程至少需要了解系统的两个基本组成部分:描述系统数学建模行为的设备,以及您试图达到的目标的输出。巡航控制系统已成为汽车行业中司空见惯的控制系统:输出由驾驶员编程,控制系统必须管理所有车辆读数以保持速度。
因为我们行驶的道路有缺陷,有时系统会自动加速或减速。如果您曾经在汽车上使用过此功能,您可能会注意到汽车会以您选择的速度保持非常平稳的速度 - 它不会突然加速或减速。这意味着车辆的控制系统首先获得所需的输出,然后通过补偿输入(例如,通过向发动机提供多少燃料)来管理实际输出的误差。
在解决系统问题之前,我们将简要分析系统(未补偿)的组件和行为,然后分析 PID(比例-积分-微分)控制器的各个组件。一步是将这两者结合起来并设计一个 PID 控制器来补偿初观察到的系统。重要的是要知道 PID 控制器不是设计人员可以应用于系统的补偿类型,但它是一个很好的起点,可以开始学习一些在其他方法中仍然适用的通用特性。
注意:在本教程中,我们将在理想条件(无噪声或干扰)下分析模拟系统,所有或大部分数学分析将通过 MATLAB 完成。
一个系统可以由以同样不同的方式排列的各种组件组成;但我们将从分析经典闭环系统的组件和功能开始(图 1)。
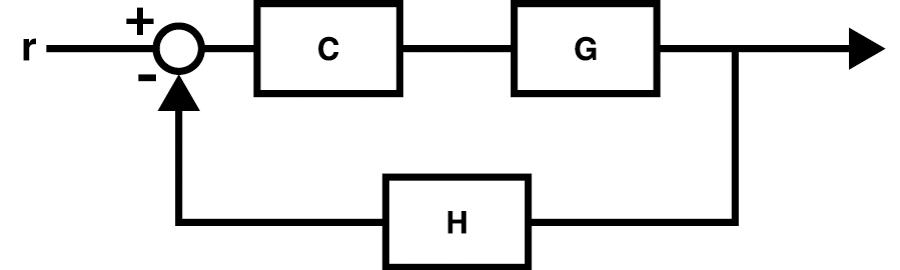
闭环(s)=C(s)?G(s)1+C(s)?G(s)?H(s)
PID 控制器实际上是一个三部分系统:
| 赔偿 | 时域 | S域 |
|---|---|---|
| 成比例的 | ||
| 衍生物 | ||
| 不可缺少的 |
因此,PID 控制器可以在数学上描述为:
| 赔偿 | 时域 | S域 |
|---|---|---|
| PID控制器 | \[K_{P} e(t)+K_{D}\frac{d}{dt}e(t)+K_{I}\int_{0}^{t}e(x)d(x)\ ] | \[K_{P} +K_{D}s+\frac{K_{I}}{s}=\frac{K_{P}s+K_{D}s^2+K_{I}}{s}\ ] |
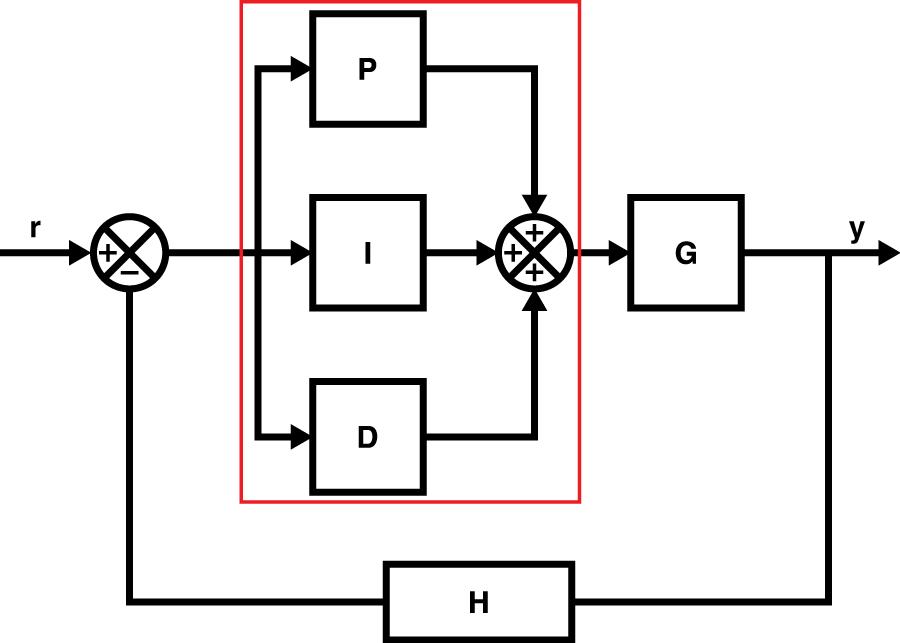
除了简单之外没有其他原因,人们可以理解为什么在分析或设计类似系统时专门使用 s 域 - 使用分数总是比进行积分和/或导数更容易。如果我们现在将我们描述的 PID 控制器应用到图 1,我们的框图现在将类似于您在下面的图 1.1 中看到的内容。
现在我们知道系统是由什么组成的以及我们将如何应用 PID 控制器,我们可以开始讨论输出信号的特性(毕竟,这是我们正在监控并试图改变的)
重要方程
输出分析:
| 特征 | 方程 | 描述 |
| 一般方程(二阶) | 这个一般方程将有助于描述典型的没有零点的二阶函数的行为。然而,并非所有传递函数都是或将是二阶的,并且许多传递函数将包含零。在这些情况下,需要进行部分分数分析以确定在高阶系统上使用二阶方程之间的误差。(注意:对于本文后面使用的示例,我们假设该错误是可以接受的)。 | |
| 过冲(百分比) | 该值将描述输出波形过冲(或超过)其终/稳态值的百分比。它表示为终值的百分比。 | |
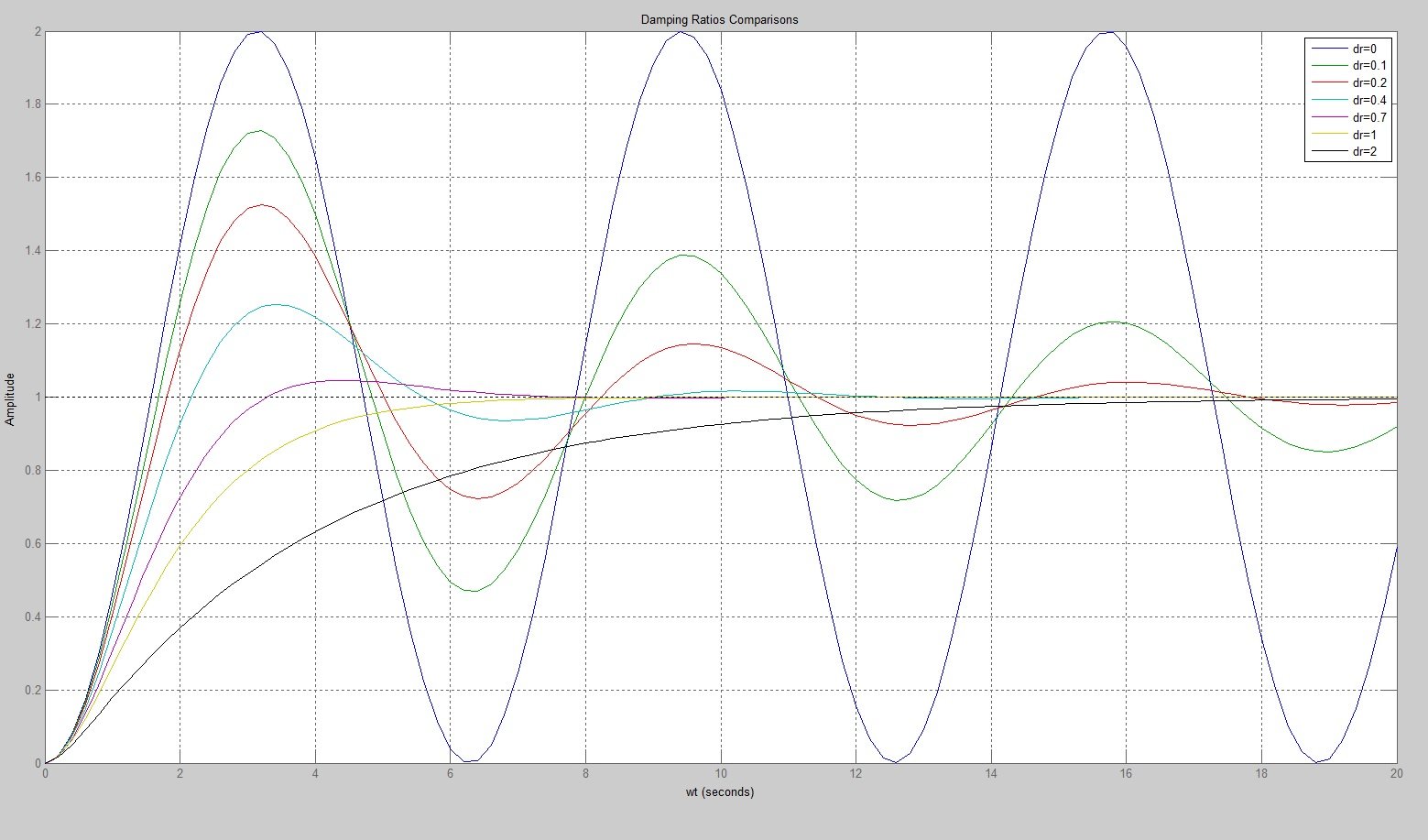
| 阻尼比 | 重要的是要注意阻尼比的方程完全取决于超调量。该比率将描述系统是无阻尼(等于 0)、欠阻尼(在 0 和 1 之间)、临界阻尼(等于 1)还是过阻尼(大于 1)。 | |
| 高峰时段 | 这是波形达到其值或峰值的时间(以秒为单位)。 | |
| 稳定时间 | 波形稳定在终/稳态值的 +/- 2% 范围内所需的时间。因为振荡可能会无限期地持续(尽管很小),所以这不需要波形稳定。 |
稳态误差分析:
其中
其中
其中
图形表示:

一旦我们拥有需要改进其响应的组件(或工厂)的传递函数,我们就需要做几项改进。MATLAB 包含许多“工程工具箱”,使工程师能够创建、分析和模拟各种不同的项目。在我们的例子中,MATLAB 包含了控制系统工具箱,其中包括为控制系统工程量身定制的几个函数。他们还包括 SISO(单输入单输出)工具,这是一个允许交互式系统分析和控制设计的 GUI。SISO 工具方法的两个方面是:
传递函数的极点和零点的变化如何改变实时响应中的根轨迹和波德图。增益的变化也可以立即反映在系统的阶跃响应中。
指定设计要求将在图形上创建视觉限制,以帮助用户设置和找到适当的增益。这是通过右键单击 SISO 工具根轨迹图并选择“设计要求”来完成的。然后选择要设置的特征类型并定义其限制。这将为您提供定义的边界限制和带阴影的“无效”区域(橙色阴影)。重要的是,作为设计师,您要列出您的优先事项并记下重要的规范。
示例系统传递函数:
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。