为了处理不同的现实世界任务,机器人应该能够处理和操纵各种物体和材料,包括纸张。虽然机器人已经成功地提高了类人机器人或机器人抓手处理多种材料的能力,但折纸仍然是机器人社区中一个很少探索的话题。
加州大学洛杉矶分校 (UCLA) 的一个研究团队近创建了一个新的计算框架,允许机器人处理折纸和东方折纸艺术。该框架在arXiv上预发表的一篇论文中介绍,将深度学习算法与物理模拟相结合。
“虽然在可变形材料处理方面已经有相当多的机器人研究,但纸张的操纵一直是一个相对未被探索的话题,尽管纸张在日常生活中无处不在,”进行这项研究的两位研究人员德中通和安德鲁蔡说,告诉
Tech Xplore。
“关于这个主题的两项相关的研究是由芬兰阿尔托大学和德国比勒费尔德大学的研究团队进行的。项涉及比纸张更容易操作的织物,而第二项则侧重于折叠纸,但开发了一个复杂的
机器人系统,涉及计算繁重的类人操纵器。”
Tong、Choi 和他们的同事近开展的工作是由于缺乏直接有效的机器人折纸系统。因此,该团队的主要目标是创建一个简单但有前途的系统,该系统可以使用单个机器人操纵器折叠纸张。
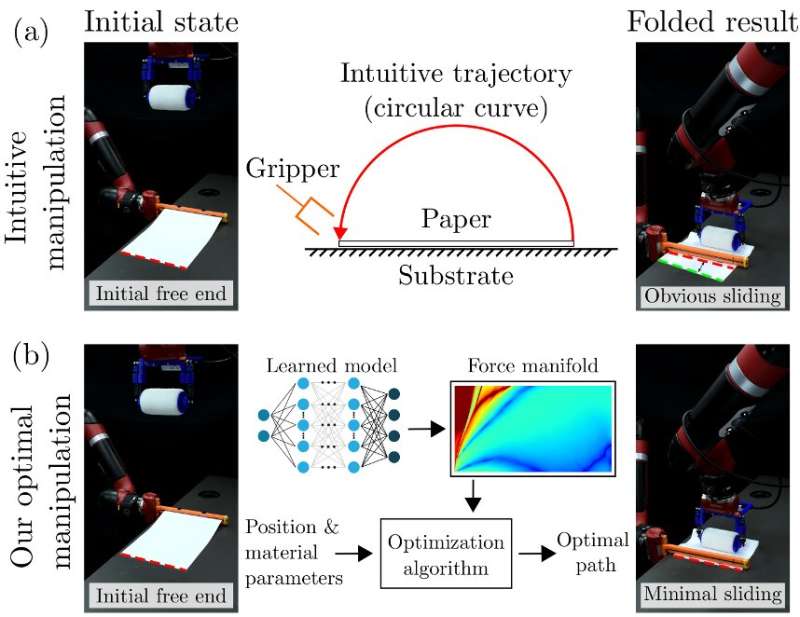
研究人员提出的机器人控制策略从物理角度“教”机器人行为,使它们能够更好地处理涉及物理洞察力操纵的任务。更具体地说,该团队在涉及纸张折叠物理模拟的离线环境中训练了人工神经网络(ANN)。在训练过程中,网络学习了纸张在不同物理位置受到不同抓握时的“行为”。
“训练数据完全是通过基于物理的计算机模拟生成的,”Tong 和 Choi 解释道。“随后,经过训练的神经网络在线实时地快速做出预测,从而产生操作轨迹。另一个关键的创新是我们使用缩放分析(一种从数学物理学中采用的技术)对神经网络的预测进行无量纲化。 “
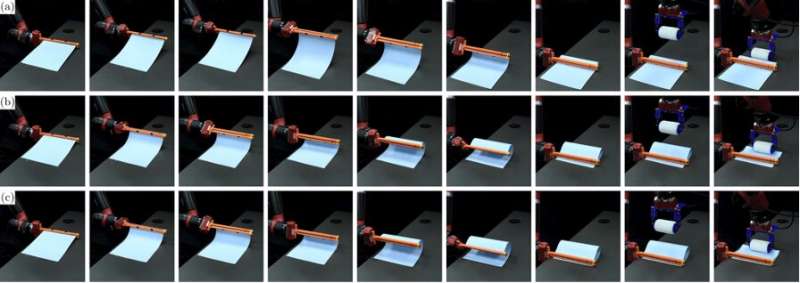
硬(卡)纸的半谷折叠。(a) 直观的基线操作严重失败,因为纸张的刚度导致折叠过程中过度滑动。(b) 我们的开环控制算法实现了对基线的显着改进,滑动。(c) 我们的闭环控制算法实现了近乎完美的折叠。图片 等人。
在本文中,术语“无量纲化”是指通过数学物理技术使输入和输出独立于它们的单位。无量纲量是无单位的。因此,改变系统的单位不会影响分析。
在本研究的背景下,这个过程具有显着的优势。它改进了控制框架的通用性,允许机器人折叠不同厚度或不同几何形状的纸张,而无需针对每种纸张类型进行培训。
另外,无量纲化降低了折纸问题的“维度”。换句话说,它可以更轻松地训练神经网络,同时提高其实时性能。
“鉴于许多可变形物体的高度非线性行为,机器人一直在努力开发有效的方法来控制机器人,以满足现实世界的操作任务,例如折纸,”Tong 和 Choi 说。
“我们工作的一个令人兴奋的发现是,机器学习算法和基于物理的缩放分析是互补的,并且对于机器人可变形物体操纵的目的非常有效。一方面,传统的数学物理模型在处理物体时会遇到难以处理的计算成本例如纸张,从而导致在线控制不可行。另一方面,天真地使用机器学习来缓解问题导致控制方案仅适用于训练数据范围内的场景(即,即使被操纵的可变形物体的材料被修改)。”
这组研究人员近的工作强调了在解决现实世界的机器人对象操作问题时将缩放分析与深度学习相结合的价值。他们的初步发现在准确性和效率方面都非常有前途。
未来,Tong、Choi 和他们的同事创建的框架可以帮助显着增强机器人的物体操纵能力。例如,它可以让他们以先进的方式处理更广泛的物体,包括纸张和其他可变形材料制成的物品。
“据我们所知,我们的框架是个利用这种协同方法的框架,我们相信它可以广泛用于各种可变形操作任务,例如
电缆管理、打结、机器人剪纸等,”Tong 和 Choi添加。“我们希望扩展我们的工作以涵盖更复杂的折叠任务,例如机器人折纸。一个有趣的目标是让机器人能够将一张纸折叠成不同的结构,例如纸飞机、纸青蛙等。”