摘要:为了满足废墟搜救雷达数据量大.算法复杂.实时化要求高等特点,采用一种双DSP并行处理系统,主DSP负责与上位机通信.数据采集.体动信号检测和静目标预处理,从DSP负责静目标的检测,通过从DSP的HPI接口实现与主DSP之间的数据通信,解决了单DSP难以满足算法实时化的问题,阐述了处理系统的硬件设计.软件处理流程与软件程序优化方法.
0 引言
近年来,搜救雷达技术成为生命探测领域的新秀,该技术融合雷达技术.生命医学工程技术于一体,能够对废墟内的目标人体进行定位与跟踪,在灾害搜救.城区巷战等领域具有广泛的应用前景,因此引起了人们的众多关注.由于应用环境复杂多变,废墟搜救雷达需对探测区域是否存在生命体快速准确作出判别,因此,如何实时识别生命目标,确定其相关位置至关重要.单片DSP构成的信号处理系统难以满足需求,本文介绍一种基于HPI接口的双DSP处理系统,该系统具有速度快.灵活性高.体积小.功耗低等特点,被成功运用于废墟搜救雷达中.
1 系统设计方案携带生命信息的雷达回波信号经过A/D 转换器转换成数字信号,实时处理系统对该数字信号进行生命特征分析处理,提取出人体生命信息,并对结果进行上报.基本功能分为数据存储.生命信息实时处理.结果上传等.系统框图如图1所示.
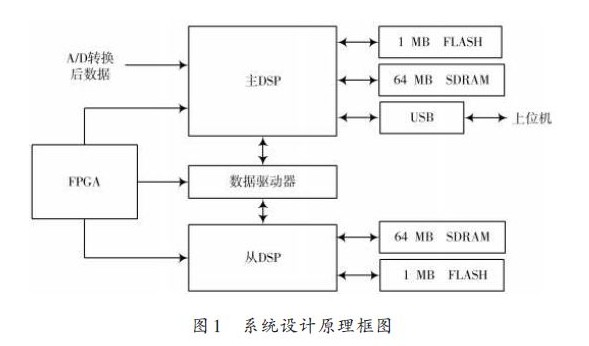
系统以两片DSP TMS320C6713B 为,由FPGA配合完成数据采集处理工作.
主DSP芯片负责与上位机和从DSP进行通信,用于完成数据存储.预处理和结果上传.通过USB接口接收上位机命令参数,通过多通道缓冲接口接收A/D转换后的数据,并将数据存储在外部扩展空间,在内部进行体动信号检测与静目标的预处理,同时将提取的体动位置信息和静目标识别结果通过USB 接口传至上位机;从DSP 通过HPI口接收主DSP 发送的相关参数以及预处理后的数据,进行静目标信息实时处理,完成生命特征的识别,判别生命体的位置信息,并将处理后得到的相对坐标通过HPI口传送至主DSP.
FPGA完成系统的逻辑控制功能.
2 硬件设计和实现
2.1 主从DSP芯片选择
根据本系统设计中所处理数据量大,数据处理相关性高,硬件电路集成度高.体积小.功耗低和实时检测的要求以及FFT.LMS 滤波等多种复杂算法的需要,实时处理系统必须具有强大的运算能力.单片DSP构成的信号处理系统难以满足需求,选用两片TI 公司C6000系列高性能浮点DSPTMS320C6713B作为信号处理系统的开发平台,TMS320C6713B 是32 b 高性能浮点信号处理器,在工作主频达300 MHz,双浮点乘法器运算速度可达600 MMACS.TMS320C6713B 采用改进的哈佛体系结构,利用超长指令字(VLIW)实现指令级并行,具有双浮点运算能力,同时具有多通道缓冲接口(McBSP)和32 b 外部存储器接口(EMIF),4 个CE空间,每个空间均可与SDRAM.SBSRAM 和异步外设实现无缝接口,主机接口(HPI)集成在TMS320C6713B片内,主机通过HPI 模块能够直接访问DSP 的大部分存储空间.
2.2 外围电路设计
外围电路设计主要包括时钟设计.电源设计和存储器设计.
系统所用的时钟为50 MHz 晶振,由于主从DSP和FPGA 逻辑均需要时钟信号,考虑时钟的驱动能力,50 MHz 时钟输入至FPGA,经FPGA译码分别输出至主从DSP 的外部时钟脚,在DSP 内部经PLL 锁相环产生200 MHz 的工作时钟,配置外部存储器工作时钟100 MHz.
系统采用TI公司的TPS54386提供所需要的两种电压3.3 V 和1.26 V,同时其双电压的上电和掉电顺序内部受控,可以满足TMS320C6713B的供电顺序要求.
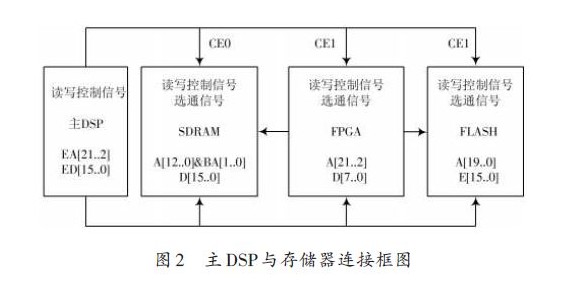
主DSP负责数据采集.存储与体动信号的检测,需要存储大量的原始数据,并对数据进行预处理,而DSP内部的存储空间不能满足这个要求,所以搭接一片MT48LC32M16 作为外部数据存储器,占用主DSP 的CE0空间.从DSP负责静目标的跟踪定位,需要存储主DSP 预处理的数据,并对数据进行FFT.LMS 滤波等处理,采用一片MT48LC32M16作为外部数据存储器,占用从DSP 的CE0 空间.AM29LV800B 作为外部程序存储器,具备512K×16位的存储容量,在系统上电后将存储在其中的用户程序引导到高速数据存储器中运行,它直接与DSP 相接,与FPGA 共同占用主DSP 的CE1 空间,DSP通过地址线EA区分选择FLASH还是FPGA.
主DSP数据存储器和程序存储器的片选.读写.时钟信号均由FPGA根据TMS320C6713的EMIF接口信号进行译码控制,主DSP 与存储器连接框图如图2 所示.
从DSP存储器设计与主DSP存储器设计一致.
2.3 与A/D转换器的通信设计
FPGA 产生A/D 转换所需的控制信号,A/D 转换后的数字信号输出端DOUT 直接与DSP 的串行数据输入端DR0相连,串行时钟信号SCLK直接与DSP串行口接收时钟信号CLKR0相连,SYNC与DSP串行口接收时钟信号FSR0相连,由DSP进行DMA 读取,不占用CPU 时间.帧同步FSR0作为DMA的触发信号,每进行A/D转换,数据就同步写入DSP内部存储器中.当满足一定的数据量后,DSP将数据转移到外部存储器进行处理.
此设计的优点是:数据采集能够自动完成,而不需要处理器的参与,使得主DSP专注于算法运算.
2.4 主从DSP相互通信设计
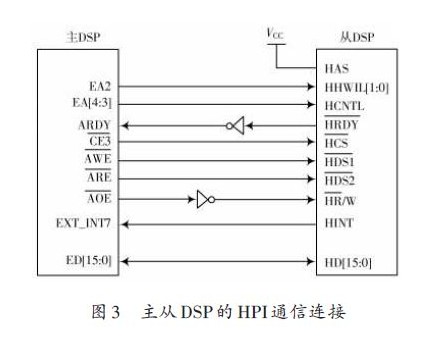
利用主DSP的EMIF和从DSP的HPI相互连接完成主从DSP之间的高速通信.由于两者之间的数据交互是异步通信,因此需要握手机制来确保通信的正常运行,系统利用主DSP 提供的外部硬件中断完成通信[7].
由于HPI访问方式不需外加芯片,因此基于HPI接口的双DSP设计缩小了系统体积.减小了系统功耗.具体的连接方式如图3所示.
在设计中,就主DSP 而言,从DSP 的HPI作为异步存储空间来访问,并将其地址划分到主DSP 的CE3 空间,因此,将EMIF的片选输出信号C–E–3 连接到HPI的选择信号H-C-S 上,HCNTL[1:0]指定主DSP 当前访问的HPI寄存器,将主DSP的地址线与HCNTL[1:0]相连,主DSP 就能通过地址区分HPIC.HPIA 和HPID,从DSP 的HPI中断向主DSP发出中断请求,并向主DSP发送静目标检测结果数据.
2.5 与上位机通信设计
采用USB 芯片ISP1581 实现主DSP 与上位机之间的数据传输,设计时将USB划分为主DSP的CE2空间,USB的中断管脚接入主DSP的EXT_INT6管脚.主DSP根据接收到的命令参数进行相应的处理,当检测到有体动信息存在时,向上位机传输体动目标或静目标探测的位置信息.
3 系统的软件设计
废墟搜救雷达的实时信号处理主要有两个处理模块:体动信号检测模块和静目标检测模块.信号处理流程首先检测跟踪视场里的体动目标,同时将数据缓存,当缓存的数据量满足静目标检测数据量要求时,进行静态目标的检测处理[8].
3.1 主DSP工作流程
主DSP处理流程如图4所示.
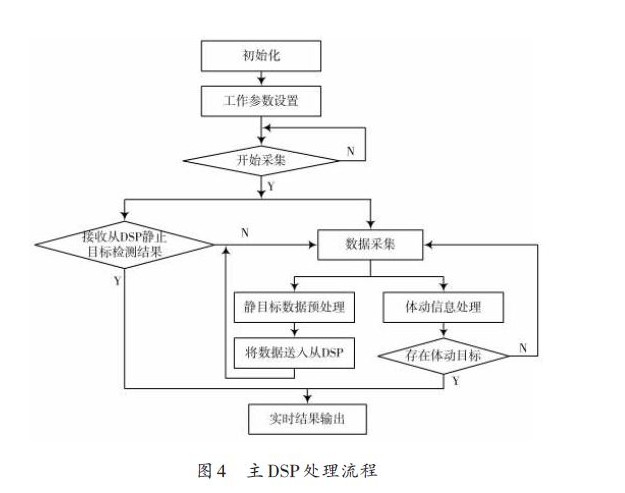
系统开启后首先屏蔽所有可屏蔽中断,然后对DSP进行初始化,包括状态寄存器.矢量表以及MeBSP串行口的初始化,SPI 初始化.然后打开中断,等待外部中断.
主DSP通过USB口接收上位机发送的雷达工作参数,开始数据采集,在中断服务程序中读取A/D 转换后的数据,在主程序中对数据进行体动信号检测和静目标的预处理,并向从DSP的HPI口写入预处理的数据.当存在体动目标或者检测到静目标的生命特征信息时,通过USB口向上位机传输检测结果.
对于体动信号检测来说,人体的晃动使得雷达回波能量较强,主要是通过能量法来检测体动目标.主要处理有数据归一化.背景消除.低通滤波.体动目标检测.
原始采集的雷达数据量非常大,不利于DSP的实时实现,其次静人体目标的特征信号非常微弱,常常会被淹盖在其周围背景以及环境噪声中,利用信号预处理手段来增强信噪比.对于静目标信号预处理有:道内数据压缩,这里采用的是8点压缩,将原始数据的8 192点压缩至1 024点;时域积分;寻找波形.
3.2 从DSP工作流程
从DSP读取HPI口发送的数据,并将其存放在外部存储器中,完成静目标的人体生命特征提取,从DSP的处理流程如图5所示.
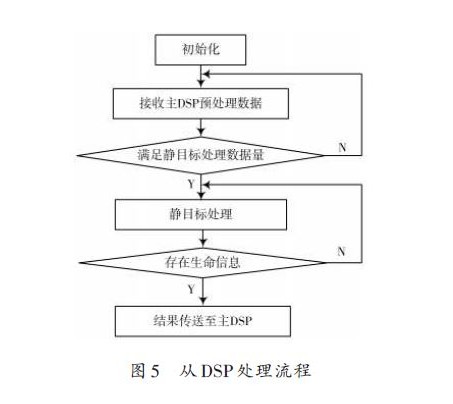
对于静目标主要是通过提取人体的生命特征信号来检测的,整个处理实际就是强背景下小信号提取的过程,主要的处理有:时域内滑动加窗增强信噪比;背景消除;寻找信号位置;静目标人体检测.在寻找到信号的基础上,通过自适应LMS 滤波方法分离静目标人体特征呼吸信号和噪声.
3.3 DSP程序优化设计方法
在实时处理系统中,软件的处理速度是系统设计中考虑的重要因素,根据DSP的特点,优化程序设计非常重要.系统中滤波.FFT等计算过程是占用时间多的过程,这部分程序的优化对系统性能提高至关重要,使用时必须考虑系统本身数据特点,详细测定每一部分程序的运行时间,分析每部分程序的合理性.
在设计中,尽可能引用前面的计算结果,尤其是对大量数据进行的乘和累加的结果,而不用每次都由原始数据重新计算,避免不必要的中间环节,算法优化是提高性能有效的手段.
由于采集的数据为16 位数据,在计算过程尽量采用定点运算提高运算速度,尽可能减少除法器的应用,减少指令执行周期.
4 结语
该系统采用高性能的双DSP芯片构建集信号采集.信号处理.信号传输等功能于一体的废墟搜救雷达处理系统,实验证明设计原理切实可行,电路功能合理,软件系统运行稳定,能够完成大量复杂的算法,目标相应时间小于30 s,能够满足废墟搜救雷达智能化.实时化的要求,而且整个处理系统集成度高.体积小.功耗低.编程灵活,由此构成的废墟搜救系统具有很好的应用前景.
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。