摘要:为了能够实现在动态条件下对坦克炮塔进行转角测试,提出了基于DSP的嵌入式装置应用于炮塔转角中。采用基于图像法坦克炮塔转角的动态高测量。通过积分投影算法获得测量靶标的分割区域,运用特征模板对编码的靶标图像进行信息的角度解码,终实现角度测量。测量装置能够在实验室和车载环境下对炮塔进行转角测试,经实验验证该算法的转角解算可以达到6.11″,满足系统分析的准确率。实时性及可靠性要求。
0 引言
坦克作为许多国家陆军作战的主要突击兵器,在进攻。防御和机动合一的作战状况下,希望能够在高速机动中向敌方军事目标稳定准确地射击。炮塔转角测试的直接影响其跟踪。定位。打击的准确和稳定性,其中炮塔相对底盘的转角测试的准确性为瞄准射击起到决定性的作用。
目前,国内所有主战坦克中所配备的炮塔相对底盘的转角测量装置仅是为乘员提供火炮相对底盘粗略转动角度,传统的测角方法采用机械表盘显示,并且不具备信号输出功能,自动化程度低,仅解决了坦克车体的转向问题;坦克底盘上所配备的角度测量装置仅是解决坦克车体的转向问题,上述测角装置的测量一般在1°~2°。国内主战坦克所配备的陀螺仅实现坦克炮线与瞄线之间的角度测量,测量一般在8.25″,不能够达到炮塔相对底盘的转角的测量。本文提出的基于图像法的测量装置与靶标图像的设计提高了转角测试的。
1 系统组成原理
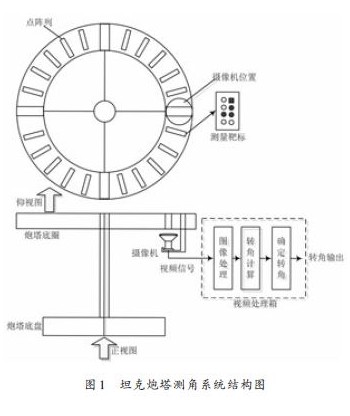
坦克炮塔动态转角测量装置由炮塔转台。测量靶标。光学成像系统。图像处理单元。数据处理软件组成,如图1所示,安装在炮塔底盘上的CCD摄像机通过采集图像信息[1]获得炮塔与底盘转角的位置信息,将图像信息送入图像处理单元,通过图像数据处理进行角度解算,确定炮塔与底盘转角的角度信息。
2 测量靶标的设计
炮塔转台座圈。底盘特征本身决定,设计了测量靶标,它由表示二进制信息的点阵列环带标志物构成,每组点阵列由8个信息点组成。256组点阵列标志物保证了在CCD视场内存在两组点阵列图形。将靶标图像二进制编码后可表示28 个不同的信息,将这256组点阵均布于坦克盘座圈的端面上。每相邻两个测量靶标角度为360°/ 256 = 1.4°,即通过判断二进制的靶标信息,可识别炮塔的位置。测量靶标如图2所示。

3 软件算法流程
3.1 图像预处理
坦克行径过程中的颠簸,内部光线昏暗等原因,CCD拍到的图像特征不显着。这时需要对输入处理系统的图像进行一定的图像增强,经过增强后的图像,视觉效果会有所改善,同时也突出了某些特征信息,增强了对某些信息的鉴别能力。滤波采用的是中值滤波改进算法和领域中值滤波,滤波后有利于后面的特征提取,经过增强滤波后的图像对其进行二值化。
3.2 测量靶标图像的中心靶点特征提取
3.2.1 靶标图像的积分投影
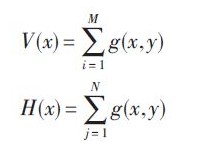
中间区域编码环带的定位,积分投影法初是由Kanade 运用到人脸识别中的,此方法可以通过垂直灰度投影和水平灰度投影有效地获取特征位置,该算法针对二值化后的测量靶标图像进行。设二值化图像g(x,y)的大小为M×N 则水平和垂直灰度投影的函数分别定义为:
垂直积分投影定位方法:首先对二值化后的图像做垂直积分投影得到投影曲线,再运用式(4)对曲线进行平滑处理,得到平滑线图,对平滑后的曲线在图像的左半部分求具有梯度的点,记为左边界,同理在图像的右半部分找到梯度的点作为图像的右边界,水平积分投影定位同理,通过积分投影可获得靶标图像的待解码区可以更好地分割图像,如图3为积分投影后的靶标图像直方图,分别选取垂直和水平投影4个尖峰象素点,确定分割区域,即可得到靶标图像的待解码区(中心靶点所在区域)。


3.2.2 靶标图像的模板匹配
SUSAN 算子模板匹配算法不依赖于目标的其他局部特征,利用特征点本身的特点直接提取,算法速度快。实时性强,但是准确性不高,SUSAN 算子采用圆形模板来得到各向同性的响应。在数字图像中,圆可以用一个含有37 个像素的模板来近似。这37 个像素排成7 行,分别有3,5,7,7,7,5,3个像素。
设圆形模板为N(x,y),对整幅图像中的所有像素,用该模板进行扫描,比较模板内每个像素与中心像素的灰度值,若模板内某个像素的灰度与模板中心像素(核)灰度的差值小于一定阈值,则认为该点与核具有相同(或相近)的灰度。根据SUSAN算子检测能得到靶标图像的边缘点和角点这一特点,建立简单的测量靶标的轮廓模型搜索定位靶标位置,从而确定图像的特征点。
靶标特征点的提取,对实时性要求较高,而且需要提取出的测量靶标目标特征点计算角度信息,所以根据其图案形状提出了适合特征点提取方法:即先提取中心直线,然后求离中心直线近的靶标特征点图案的方法。在选取到的圆心模板扫描测量靶标时,在待解码区从左往右从上往下顺序的扫描过程中,若与全1模板匹配,怎会显示1,若与全0模板匹配则为0,从而完成粗略角度的测量,跟踪图案与模板的相似度分析,提取出了测量靶标的特征点,按照相关算法计算确定粗略角度。
采用投影和SUSAN 算子确定编码合作目标中心(X 中,Y 中),对图像中心定位,即十字光标对图像中心定位,图像对半分割,图像从左侧进行分割,提取编码带环所在的中间区域,形成中心竖轴和水平轴,即Y 和X 轴;十字光标的中心定值位,即完成炮塔转台的初始的粗略定位。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。