随着电子科学技术的迅速发展,单基地雷达存在着很大的局限性,小型双多基地雷达的应用越来越广泛,需求日趋迫切。卫星通信具有通信距离远,通信容量大,业务类型多,传送不受地理条件限制等优点,在通信、广播、导航定位、气象服务、遥感遥测、地球资源勘测、环境监测、技术侦查等商用和军事应用方面应用广泛。其中,海事卫星通信系统在移动卫星通信中具有不可替代性,发展前景广阔。复合式的双基地雷达特别适合于空中交通管制系统,它比单基地雷达的测速效率高,好;此外双基地雷达的目标分辨能力较高,在分析大气的垂直结构时要比单雷达更优越,而大气的垂直结构则是气象分析的重点。CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由研发和生产汽车电子产品着称的德国BOSCH公司开发了的,并终成为国际标准(ISO118?8)。是国际上应用广泛的现场总线之一。 在北美和西欧,CAN总线协议已经成为汽车计算机控制系统和嵌入式工业控制局域网的标准总线,并且拥有以CAN为底层协议专为大型货车和重工机械车辆设计的J1939协议。近年来,其所具有的高可靠性和良好的错误检测能力受到重视,被广泛应用于汽车计算机控制系统和环境温度恶劣、电磁辐射强和振动大的工业环境。
1 CAN总线多夫线控制系统的组成
CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。现场总线是当今自动化领域技术发展的热点之一,被誉为自动化领域的计算机局域网。它的出现为分布式控制系统实现各节点之间实时、可靠的数据通信提供了强有力的技术支持。在当前的汽车产业中,出于对安全性、舒适性、方便性、低公害、低成本的要求,各种各样的电子控制系统被开发了出来。由于这些系统之间通信所用的数据类型及对可靠性的要求不尽相同,由多条总线构成的情况很多,线束的数量也随之增加。
多天线控制系统由本地控制组件、CAN总线和天线控制器组成,如图1所示。其中本地控制组件包括本控面板、电源、微处理器和电机驱动电路,负责天线的位置信息采集和电机控制算法的实现;CAN总线采用CAN 2.0B标准协议进行数据传输,接口芯片采用SJA1000,完成物理链路层和数据链路层两层功能;天线控制器包括显示面板、控制按键、手轮、微处理器等,用于接收用户操作指令,显示指定天线的状态和控制天线的运动方式。
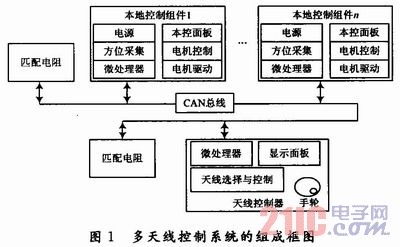
在由CAN总线构成的天线控制系统中,天线控制器和本地控制组件各分配一个固定的CAN网络地址,天线控制器通过面板选择所要控制的天线编号,将该天线的工作方式(扇扫、环扫、手动)、工作参数(扇扫边界、扫描速度)等发送到所选天线的本地控制组件,再由本地控制组件根据天线控制器给出的控制算法,实现对天线的控制,并将天线的当前参数(方位、转速、转向)通过CAN总线传送到天线控制器上显示。手动方式时,所选天线的本地控制组件根据天线控制器手轮的控制信息和跟随算法,实现对天线的手动位置控制。
2 方位传感器的数字化设计
传感器是一种物理装置或生物器官,能够探测、感受外界的信号、物理条件(如光、热、湿度)或化学组成(如烟雾),并将探知的信息传递给其他装置或器官。传感器是一种检测装置,能感受到被测量的信息,并能将检测感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。它是实现自动检测和自动控制的首要环节。
在对天线位置信息的采集中,方位传感器采用同步机电路实现。其中,定子线圈加入工频激磁电压,转子的三相电压幅度受定子与转子相对角度的调制,三个转子线圈之间相互间隔120°放置。在模拟信号传输中,同步接收机会根据三相电压幅度的变化跟随同步机做同步旋转,达到传输角度信号之目的。为了便于与微处理器的连接,输出的方位信号还必须做数字化处理。
设同步机定子加激磁电压Vo=Vmsinωt,三个转子线圈的电压方程为:
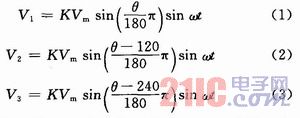
式中:K为转子绕组与定子绕组的变压比;θ为转子相对于定子的转角;ω为工频激磁电压的角频率。
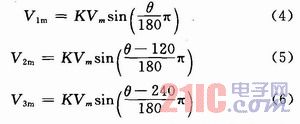
由此可知,在激磁电压正峰值时,对三个电压取值,则V1,V2,V3与转角θ的关系为:
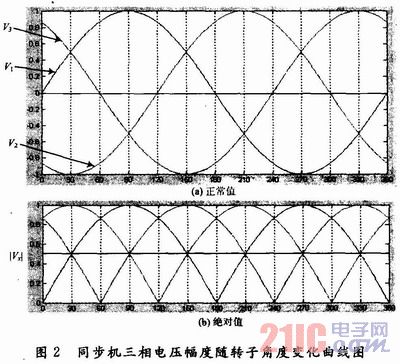
将转角θ从0~360°划分为12个区间,每个区间30°,则可将同步机三相电压幅度随转子角度变化的曲线绘制如图2所示。
如果用V1-V2,V2-V3,V3-V1以及V1,V2,V3中的信号Vx的极性来表示这12个区间,则很容易得到各区间的二进制代码,如表1所示。例如:当θ角在0~30°时,V1-V2为正,V2-V3为负,V3-V1为正,而此时V1的,即Vx=V1,其值为正,则该区间可以用(10 11)B表示。
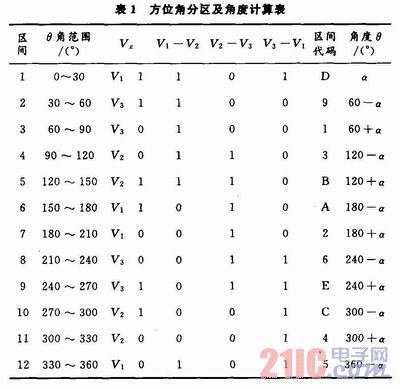
进一步,对此时的Vx信号做归一化处理后再进行反正弦运算,其结果是单调的,且计算出的角度值α介于0~30°之间。根据θ角所在的区间,就可求出当前天线的方位。
根据以上分析,可以将方位信号数字化过程简述如下:在激磁工频信号的正峰值点生成采样脉冲信号CP0和微处理器中断信号CP1,控制三路采样保持电路同时对分压后的同步机三相电压进行采样保持,选择的一路信号送A/D转换器,同时判断其正负;区间代码生成电路根据对三路采样信号的比较和信号的正负,确定θ角所处区间的代码;微处理器响应中断,启动A/D转换,求得α值,同时读取θ角所处区间代码,根据表1给出的区间计算公式,确定θ角的具体数值送本地面板显示,并通过CAN总线上传天线控制器。
方位数字化电路原理框图如图3所示。
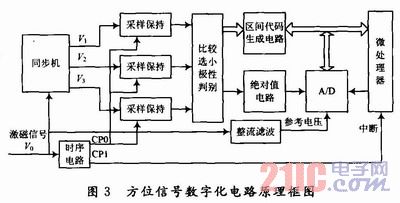
从图2可以看出,在0~30°区间内正弦曲线可近似为线性区间,为进一步提高,可以按照正弦函数曲线对A/D转换进行补偿,以满足测量的需要。同时,为避免因激磁电压的波动引起A/D转换后的数值在区间之间的跳动,A/D转换器的参考电压应与激磁电压的幅度按比例浮动。
3 位置随动旋转编码器接口设计
旋转编码器是随动控制中常用的接口部件,这里选用增量式旋转编码器,它由涂有莫尔条纹的编码盘和光电检测装置构成,编码盘上涂有两道相差90°的黑白相间隔栅,分别称之为A道和B道。工作时,光电检测器发出可见光照射在编码盘上,当编码盘旋转时,光发射管装置照过隔栅,光敏接收管便会产生通(断)的脉冲输出信号。由于A,B道相位差为90°,因此其输出脉冲也有90°的相差。当旋转编码器正转时,A信号超前B信号90°;反转时,B信号超前A信号90°。
如果直接采样A、B两路信号,电路结构会比较复杂。为便于计算机处理,可将旋转编码器的A、B两路信号进行适当变换,生成方向信号DIR和增量计数脉冲CLK.图4给出了旋转编码器的接口电路以及相应的波形。为防止因机械转动带来的波形边缘的抖动,接口电路的输入应采用施密特型。
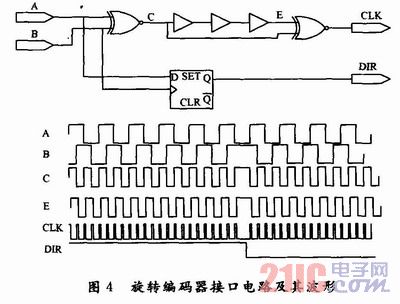
图4中C点的方波周期是A或B信号周期的1/2.为了在手轮低速转动时,防止由于A或B信号周期过大而影响计数器的正常工作,可将C点波形与经缓存器延迟后的波形E相异或,从而得到增量计数脉冲CLK,其周期应是C周期的1/2,即为A或B信号周期的1/4,实现A或B信号频率的四倍频细分。为便于计算机识别手轮的转动方向,电路中增加了方向信号DIR,当旋转编码器正向转动时,A信号超前B信号90°,此时DIR输出为高电平;反之,DIR输出为低电平。
4 天线的PID控制
当今的自动控制技术都是基于反馈的概念。反馈理论的要素包括三个部分:测量、比较和执行。测量关心的变量,与期望值相比较,用这个误差纠正调节控制系统的响应。PID(比例-积分-微分)控制器作为早实用化的控制器已有70多年历史,现在仍然是应用广泛的工业控制器。PID控制器简单易懂,使用中不需的系统模型等先决条件,因而成为应用为广泛的控制器。
图5给出了天线的PID控制原理。如图5(a)所示,在连续控制系统中,PID的控制规律可以写成如下形式:

式中:u(t)为PID控制器的输出或称为被控对象的控制输入;ε(t)为偏差;Kp为比例系数;TI为积分时间常数;TD为微分时间常数。
为在数字系统中实现PID控制,需将连续PID控制规律离散成离散型PID控制规律,即用差分方程来表示:
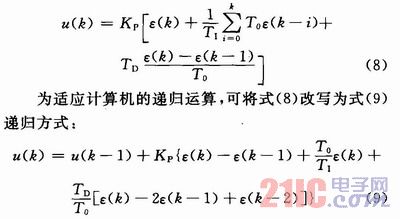
天线的离散型PID控制方案如图5(b)所示。在该方案中,天线的工作方式分为自动扫描和手动扫描两种。自动扫描方式下,天线控制器选择设定相应天线的扫描转速。由于不同波段的天线尺寸不同,各个天线转台的转动惯量也不尽相同,因此需要通过调整相应天线的比例积分和微分常数,来使天线的控制达到期望的特性。而在手动扫描时,天线控制器将手轮的转动控制,经位置随动旋转编码器变换为对天线的控制输出,通过CAN总线实时传递给指定天线的本地控制组件,由本地控制组件中的PID控制算法实现对天线的手动控制,从而达到手动跟踪目标之目的。
5 结语
CAN总线技术已在工业控制中得到广泛应用。本系统采用CAN总线,结合天线方位的数字化接口设计,将分布式微处理器联系起来,实现了多天线的数字化PID控制,简化了天线控制系统的设计,保证了天线控制的与稳定性。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。