电系统(Micro-Electro-Mechanism System, MEMS)、片上系统(SOC, System on Chip)、无线通信和低功耗嵌入式技术的飞速发展,孕育出无线传感器网络(Wireless Sensor Networks, WSN),并以其低功耗、低成本、分布式和自组织的特点带来了信息感知的一场变革。无线传感器网络就是由部署在监测区域内大量的廉价微型传感器节点组成,通过无线通信方式形成的一个多跳自组织网络。
无线传感器网络所具有的众多类型的传感器,可探测包括地震、电磁、温度、湿度、噪声、光强度、压力、土壤成分、移动物体的大小、速度和方向等周边环境中多种多样的现象。基于MEMS的微传感技术和无线联网技术为无线传感器网络赋予了广阔的应用前景。这些潜在的应用领域可以归纳为:军事、航空、反恐、防爆、救灾、环境、医疗、保健、家居、工业、商业等领域。
无线传感器网络是一种全新的信息获取平台,能够实时监测和采集网络分布区域内的各种检测对象的信息,并将这些信息发送到网关节点,以实现复杂的指定范围内目标检测与跟踪,具有快速展开、抗毁性强等特点,有着广阔的应用前景。
在实际的应用中由于反射、多径传播、非视距、天线增益等问题都会对RSSI的测距产生误差,从而引起较大的定位误差。本文利用二维空间的Cayley - Menger行列式[2,3]提供的几何约束对RSSI的测距误差进行优化修正,结合三角形质心计算,提出了一种基于RSSI测距和距离几何约束结合三角形质心定位算法(RDGC-TCL)。仿真表明,该算法与基于RSSI和三角形质心定位算法(R_TCL)相比,提高了定位。

RDGC-TCL 算法
RSSI 技术
通过接收到的信号强弱测定信号点与接收点的距离,进而根据相应数据进行定位计算的一种定位技术 如无线传感的ZigBee网络CC2431芯片的定位引擎就采用的这种技术、算法。
接收机测量电路所得到的接收机输入的平均信号强度指示。这一测量值一般不包括天线增益或传输系统的损耗。
RSSI(Received Signal Strength Indicator)是接收信号的强度指示,它的实现是在反向通道基带接收滤波器之后进行的。
为了获取反向信号的特征,在RSSI的具体实现中做了如下处理:在104us内进行基带IQ功率积分得到RSSI的瞬时值,即RSSI(瞬时)=sum(I^2+Q^2);然后在约1秒内对8192个RSSI的瞬时值进行平均得到RSSI的平均值,即RSSI(平均)=sum(RSSI(瞬时))/8192,同时给出1秒内RSSI瞬时值的值和RSSI瞬时值大于某一门的比率(RSSI瞬时值大于某一门限的个数/8192)。由于 RSSI是通过在数字域进行功率积分而后反推到天线口得到的,反向通道信号传输特性的不一致会影响RSSI的。
在空载下看RSSI的平均值是判断干扰的主要手段。对于新开局,用户很少,空载下的RSSI电平一般小于-105dBm。在业务存在的情况下,有多个业务时RSSI平均值一般不会超过-95dBm。从接收质量FER上也可以参考判断是否有干扰存在。通过以发现是否存在越区覆盖而造成干扰,也可以从 Ec/Io与手机接收功率来判断是否有干扰。对于外界干扰,通过频谱仪分析进一步查出是否存在干扰源。
RSSI 测距
RSSI利用已知发射信号强度,接收点根据收到的信号强度,计算信号在传播过程中的损耗,使用理论或经验的信号传播模型将传播损耗转化为距离。常用的传播路径损耗模型有[4,5]:自由空间传播模型、对数距离路径损耗模型、哈它模型、对数-常态分布模型等。文中采用自由空间传播模型和对数-常态分布模型,用于分析和仿真。自由空间无线电传播路径损耗模型如下式:

式中:d为距信源的距离(km),f为频率(MHz),k为路径衰减因子。
在实际应用环境中,由于多径、绕射、障碍物等因素,无线电传播路径损耗与理论值相比有些变化。采用对数-常态分布模型将更加合理,式(2)计算节点收到锚节点信息的路径损耗。

式中:PL(d)为经过距离d后的路径损耗(dB);为平均值为0的高斯分布随机变数,其标准差范围为4~10。式中k的范围在2至5之间。取d=1m,带入式(1),可得到![]() ,即的值。这样根据上式可得各未知节点接收锚节点信号时的信号强度为:
,即的值。这样根据上式可得各未知节点接收锚节点信号时的信号强度为:
RSSI=发射功率+天线增益-路径损耗(PL(d) )。
Cayley-Menger行列式及距离几何约束
距离几何理论中,Cayley-Menger行列式可以被用来处理不变空间的欧拉距离几何问题[6,7]。两个n点序列{ P1,…,Pn }和{ q1,…,qn }∈ Rm组成Cayley-Menger矩阵,且定义为:

其中,(i,j {1, …,n}为pi点和qj之间的欧式距离。两个n点序列的Cayley-Menger行列式定义为:

当两个序列相同时![]()
![]() ,
, ![]() , 被称为Cayley-Menger行列式。在RSSI测距过程中,由于多径、绕射、障碍物等因素,不可避免出现测距误差,设未知节点与锚节点之间的真实距离与测量距离。设未知节点接收到锚节点 的测量信息,根据节点集合
, 被称为Cayley-Menger行列式。在RSSI测距过程中,由于多径、绕射、障碍物等因素,不可避免出现测距误差,设未知节点与锚节点之间的真实距离与测量距离。设未知节点接收到锚节点 的测量信息,根据节点集合 ,…,,…,结合[3]利用Cayley-Menger行列式的经典理论的推导,可得到r-2个独立的二次距离约束等式
,…,,…,结合[3]利用Cayley-Menger行列式的经典理论的推导,可得到r-2个独立的二次距离约束等式![]() 。
。 ![]() , 作为未知节点与锚节点在测量过程中出现的误差,在距离约束限制下形成平方误差化非线性问题:
, 作为未知节点与锚节点在测量过程中出现的误差,在距离约束限制下形成平方误差化非线性问题:

运用数值分析方法,求得解 ![]() ,进而得到未知节点与锚节点位置估计值:
,进而得到未知节点与锚节点位置估计值:

三角形质心定位算法模型
本文研究了未知节点与其无线射程范围内的三个锚节点之间的通信约束和几何关系得出了未知节点所在三角区域,将三角形的质心作为未知节点的估计位置[8,9] 。这里的三角形质心定位算法的基本思想是:三个锚节点A、B、C,未知节点D,利用RSSI和距离几何约束算出节点A和D的距离为;节点B和D的距离为;节点C和D的距离为。分别以A、B、C为圆心rA,rB,rC , 为半径画圆,可得锚圆交叠区域,通过计算三个锚圆交叠区域的三个特征点的坐标,以这三个点为三角形的顶点,未知点即为三角形的质心(如图1所示)。
假设已知3个锚节点的坐标分别为A(Xa,Ya) 、B(Xb,Yb) 、C(Xc,Yc) ,与未知节点的距离分别为rA,rB,rC ,通过下面的公式求出。
同理,可以求出F点和G点的坐标,假设未知节点M的坐标,利用质心算法得到未知节点M的估计坐标为 :
RDGC-TCL 算法过程
RDGC-TCL 算法包括使用Cayley-Menger行列式给出的距离几何约束条件对RSSI测量值进行处理来减小测量误差和利用三角形质心定位算法进行定位。
(1) 锚节点周期性发送自身的信息,信息中包括自身节点ID和自身位置坐标。
(2) 未知节点收到来自锚节点信息时,根据RSSI由强到弱对锚节点进行排序,并建立RSSI与节点到锚节点距离的映射。建立三个集合:
(3) 选取RSSI值大的前几个锚节点进行计算,并采用距离几何约束来求得未知节点与锚节点距离的估计值。
(4)在Beacon_set中选择RSSI值大的锚节点组合成下面的三角形集合,这是提高定位的关键。Triangle_set=![]() 对Triangle_set中任一个三角形根据(7)式算出三个交点的坐标,由质心算法,得到未知节点坐标。
对Triangle_set中任一个三角形根据(7)式算出三个交点的坐标,由质心算法,得到未知节点坐标。
(5)对求出的未知节点坐标集合取平均值,得未知节点坐标。
仿真分析
为了验证算法的有效性,对定位算法进行仿真。仿真场景为一个120×120的矩形区域,100个节点被随机放在区域内,其中30个锚节点,70个未知节点。
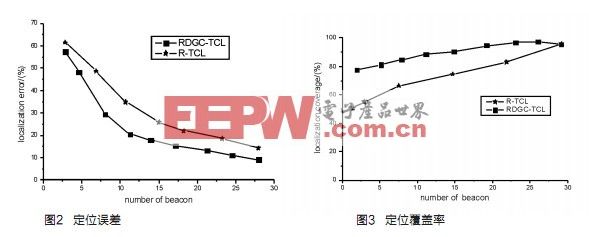
采用距离几何约束来减少RSSI测距误差并结合采用三角形质心定位算法(RDGC-TCL 算法),算法性能主要从定位误差和定位覆盖率两方面进行考虑。仿真结果如图2、图3所示。
RDGC-TCL 算法在测距校正的过程总增加了计算量和计算时间,但对定位误差的减小和定位覆盖率的增加都有了较大的提高。由图2所示,在锚节点较少的情况下,本文算法的性能提高不大,因为提供校正的测量数据较少,随着锚节点数目增加,用于校正的测量数据的增加,使得测量的距离更加的准确,使得定位的有了较大的提高。图3表明本文算法相对于R_TCL算法在节点的覆盖率方面有较大的提高。
结语
本文针对RSSI测距误差,提出了基于RSSI和距离几何约束并结合三角形质心定位算法,仿真结果表明,本文算法比传统的RSSI定位算法有更好的定位性能,能够减小定位误差并提高节点定位覆盖率,同时本定位算法对硬件的要求不高,能够降低无线传感器网络的成本,能够满足大多数无线传感器网络的应用要求,是无线传感器网络节点定位一种可选方案。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。