数字信号处理器(Digital Signal Processing,DSP)是一项成熟的数字处理技术。它具有速度快、高、抗干扰能力强、尺寸小、性能稳定等优点,特别适合处理复杂的控制算法。目前传统的DSP功能开发方法,是利用汇编语言或C/C++语言进行DSP功能开发,具有周期长,工作量大,调试复杂等缺点,不利于算法验证和产品快速开发。而且,程序所依赖的仿真器价格一般比较昂贵,也增加了产品开发的成本。
本文利用TMS320F2812芯片自主开发了硬件平台,提出了在Matlab/Simulink环境下,搭建算法模型并自动生成C代码,并通过串口至DSP目标板的快速开发方案。
1 总体方案介绍
本文自主开发的硬件平台是以TMS320F2812作为处理器,开发了串口通信、正交编码、PWM输出和启动模式跳线等功能。基于Matlab /Simulink环境的DSP快速开发方法,首先利用了自主开发的软件在DSP硬件、Code Composer Studio开发环境(CCS)和Matlab软件之间建立连接,然后在Simulink环境下,建立运动控制算法模型。在该建模过程中,用户可以像操作Matlab变量一样操作DSP的存储器和寄存器。模型搭建完成后,再利用RTW技术,将模型自动生成对应的C/C++代码,该代码能够被CCS集成开发环境支持的,经过CCS编译后生成可执行代码,利用DSP的串口将可执行代码到DSP的储存器中运行。该过程的流程图如图1所示。
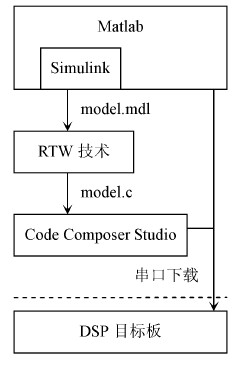
图1 方案流程图
在Matlab环境下对DSP进行开发,不仅可以方便地利用Matlab现有的数学工具箱来完成复杂算法的设计,而且将所有操作统一为Matlab命令流操作,大大降低了设计人员需要掌握不同软件的难度。
2 Matlab建模
在SimuIink环境下,使用工具箱中与DSP相关的库,将需要模块拖至模型窗口,建立目标模型,该过程与普通的Simulink建模过程相似。特别需要说明的是几类重要的模块。Target模块预定义了DSP的所有基本硬件信息,比如主频,储存器的分配,是每个模型都必须有的模块。该模块需要放置在模型的顶层,没有输入输出设置。外设模块包含了DSP所有功能外设,包括I/O口、PWM波形生成器、计时器、QEP正交编码功能等。算法模块库包含了DSP常用的算法模型,比如PID控制器。这些算法库都是支持IQrnath格式,是一种将浮点运算转化为定点运算的功能,可以提高DSP进行浮点运算的效率。模型建立完成后,利用RTW功能编译后就能生成与该模型对应的C/C++代码,并生成相应的Project文件。使用CCS集成开发环境,对该代码编译,即生成可执行文件,为串口程序做好准备。
3 串口
实现基于串口实现程序的功能,是利用了Matlab的串口通信指令和在DSP中的一个引导的函数。
3.1 引导函数
在F2812的ROM中编写引导函数,该函数是在DSP上电或重启时执行。它是用于将执行代码从外部源传输到内存储器中;从而允许代码存储在外部的慢速而不易丢失的存储器中,然后引导至DSP内部的快速存储器中执行。该引导函数提供了多种引导的方式,以适应不同的系统要求。不同的模式是根据GPIO引脚的信号来决定的,对应关系见表1。
表1 GPIO引脚状态表

本文是使用了SCI引导模式,通过串口将可执行代码传送至DSP内部来执行。所以DSP硬件的引脚必须有对应的信号输入。
3.2 串口通信
Matlab中有支持串口通信的对象,使用该对象,可以方便的实现上位机和下位机的串口通讯相关的所有事件,比如设置参数(波特率、数据位、停止位等),发送/接收数据,中断等。在本文中,使用Matlab的串口功能的基本流程如下:

3.3 程序步骤
在上位机编写串口通信函数后,就可以利用串口将可执行代码至DSP目标板运行。按照以下步骤完成:
(1)数据转换。引导函数对于流入的数据有相应的格式规定。经过CCS编译的文件必须先进行格式转化才能被引导函数接收。该过程可以使用TI公司提供的hex2000工具完成。
(2)硬件设置。将DSP硬件设置为SCI引导模式。
(3)建立串口通信。将转化后的数据流保存为Matlab的变量形式,按照前面描述的串口通讯办法,将变量中的数据传送至DSP。
(4)程序执行。
4 实验验证
为了验证本方案的可靠性,本文设计了一个串口控制电机调速的实验。该实验的内容是:上位机利用串口来发送速度指令,对电机的转速进行PID控制。其中,对电机的驱动方式采用PWM驱动方式,设置PWM的周期寄存器值是64 000个计数周期。该实验硬件连接如图2所示,DSP与PC机之间以串口连接。上位机建立控制模型如图3所示。

图2 系统结构图

图3 基于串口的PWM 占空比控制
本文所使用的DSP主频是150MHz,根据时钟分频后换算的结果,实际的PWM波的周期约是850μs,设置上位机发送指令为75%的转速,则对应的PWM的占空比为75%,其中高电平的实际长度约为640 μs,这与用示波器观察到的图4是一致的,因此,本文提出的DSP功能开发方案是可靠的。
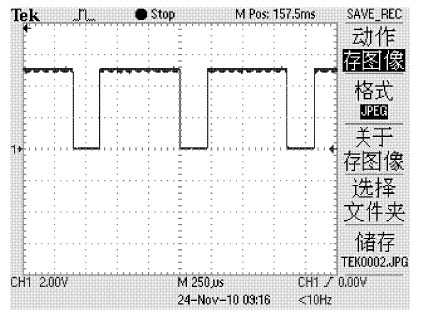
图4 PWM 占空比
5 结语
本文提出了基于Matlab/Simulink环境的DSP算法开发,并利用串口实现程序的快速开发方案。该方案很好地利用了Matlab强大的科学计算和可视化图形开发功能,缩短了DSP算法的开发周期,降低了DSP编程的工作量,节约了硬件成本。,在本文自主设计的硬件平台上进行验证,结果表明该方案是可行有效的。
[1]. TMS320F2812 datasheet https://www.dzsc.com/datasheet/TMS320F2812_1116432.html.
[2]. ROM datasheet https://www.dzsc.com/datasheet/ROM_1188413.html.
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。