近期由于电力电子技术的发展,人们可以通过改变电机的供电频率,来改变电机的转速,进而达到改变负载的转速,这种调速方法称为变频调速。当锅炉负荷变化时,使用变频调速技术合理地调节引送风机的运行工况,不仅方便调节工艺,而且节约大量能源。本文先对TMS320F2812芯片和智能功率模块进行了详细的介绍,根据他们的特点设计了通用变频电路设计方案。在实际的应用中可以根据控制方式的需要,制定不同的控制方式,广泛应用于三相异步电机的SVPWM控制。
1 变频调速方式
变频调速技术的基本原理是根据电机转速与工作电源输入频率成正比的关系: n =60 f(1-s)/p,(式中n、f、s、p分别表示转速、输入频率、电机转差率、电机磁极对数);通过改变电动机工作电源频率达到改变电机转速的目的。
交流电机的转速为n1=60f/p,再根据异步电机转差率s=(n1-n)/n1,可知交流异步机的转速公式为:n=n1(1-s)=(1-s)60f/p,其中P为极对数,s为转差率,f为定子供电频率,当p和s为定植时,要改变电机的转速,只需要改变f就可以了。通常分为三种调速方式:在变频调速过程中保持定子电压和定子供电频率之比为常数,保持定子电流不变的恒流控制调速方式,保挣恒电磁通调速方式。
在具体控制上,可以采用VVVF(Variable Voltagevariable Frequency)变频或矢量控制变频控制方式,在电路设计时,需要实时采样相电压以及各相电流,根据控制方式的不同,可以选用不同的算法程序。
2 高速DSP芯片TMS320F2812介绍
TMS320F2812DSP是TI推出的一款32位高性能数字信号处理器,是专为控制设计的高速DSP芯片,拥有峰值每秒运行150万条指令的处理速度及单周期完成32×32位MAC运算的功能,再加上两个事件管理器、片上Flash以及片上RAM和AD转换模块,能够实现实时快速的数字信号处理算法,在三相异步电机控制系统中广泛的被采用。
(1)高性能的32位中央处理器
主频150MHZ(时钟周期6.67ns),低功耗,16位×16位和32位×32位乘且累加操作以及16位×16位的两个乘且累加,统一的寄存器编程模式,可达4M字的线性程序地址和数据地址。
(2)片内存储器
◆ 8Kx16位的Flash存储器
◆ 1Kx16位的0TP型只读存储器
◆ L0和L1:两块4Kx16位的单口随机存储器(SARAM)
◆ HO:一块8Kx16位的单口随机存储器
◆ M0和M1:两块1Kx16位的单口随机存储器
(3)时钟与系统控制
◆ 支持动态的改变锁相环的频率(PLL)
◆ 片内振荡器
◆ 看门狗定时器模块
◆ CPU级和外设级中断相结合的控制系统
(4)丰富的外围设备
◆ 两个事件管理器(EVA、EVB)
◆ 串行外围接口(SPI)
◆ 两个串行通信接口(SCI),标准的UART
◆ 改进的控制器局域网络(ECAN)
◆ 多通道缓冲串行接口(MCBSP)
◆ 16通道12位的数模转换器(ADC)
3 智能功率模块DIP-IPM
三菱第五代IGBT芯片的DIP-IPM模块是三菱公司总结前四代功率模块的基础上设计的,是专为三相电机驱动设计的功率模块。其特点:提高可靠性和马达效率,单电源15V供电,实现低损耗;热阻低,易于散热,简化了设计空间,低成本单模封装;内置短路、欠压保护电路。输入接口电路采用高电平驱动逻辑,消除了旧产品低电平驱动方式对电源投入和切断时的时序要求。增强了模块自保护能力;输入信号端内置下拉电阻,外部无须再下拉电阻,可直接由DSP或3V级单片机驱动。

如上图所示,图1为IPM模块的上驱动部分,图2为IPM模块的下驱动部分。一个完整的DIP-IPM模块包括三个上驱动部分和一个下驱动部分,在图1中给出的只是U相的驱动电路,V、W相与U相的电路完全相同。下面就结合内部结构对模块进行说明。
UP,VP,WP,UN,VN,WN,控制信号输入端子,此为控制开关运行的信号输入端子,信号为电压型。各信号线可直接与单片机输出口连接,无需接光耦隔离。
◆ P为逆变器直流母线的正电源端。在模块内部,此端与上臂IGBT的集电极相连。为抑制直流母线引线和PCB上寄生电感引起的浪涌电压,应在非常靠近P,N端子处加平滑电容或具有良好频率特性的小薄膜电容。
◆ N为逆变器直流母线的负电源端。在模块内部,此端与下臂IGBT的发射极相连。
◆ U、V、W为逆变器输出端,用于连接逆变器负载。
◆ CFO是故障信号输出脉宽设定端子,是用来设定故障输出信号脉冲宽度。
◆ Fo为故障信号输出端子,用来输出故障信号,信号为低电平时有效。
◆ VP1分别是P侧控制电源端子,给模块内部IC供电的控制电源端子,应在模块外部将VP1连接起来。
4 硬件电路设计
4.1 主结构框图
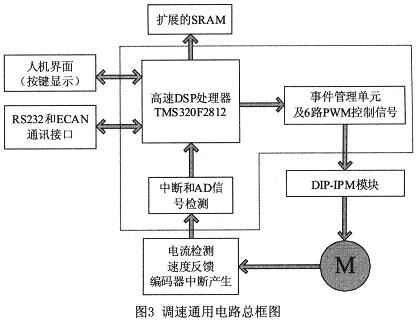
系统电路部分主要包括DSP芯片TMS320F2812、RS232与CAN总线的通讯部分,外扩展的SRAM芯片,驱动电机的DIP-IPM模块,电流检测电路和位置传感器检查电路。人机界面包括按键和液晶显示,电源部分分为DSP与DIP-IPM模块的电源、电机的驱动功率电源。
如图3所示,为三相电机调速通用电路总框图,采用TMS320F2812芯片后,可以限度的利用其自身自带的硬件资源,如:AD、PWM、EVA和EVB,为电路设计提供了很多便利。电压和电流信号可以采用AD采样的方式,位置、转速可以采用编码器中断方式实现。
4.2 电流检查
接下来阐述该系统的电流检查电路,如图4所示,为电流检测的原理图。
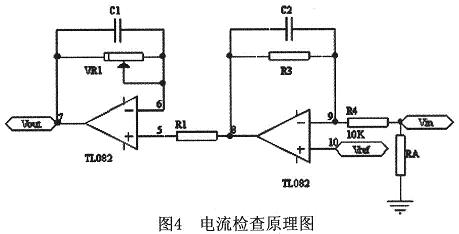
可以根据电路特点选取不同类型的霍尔电流传感器,根据测试需要选择原级/次级匝比,例如原级/次级匝比为1:500时,原级额定电流为5A,次级额定输出电流为10mA。外接测量电阻选择RA=200Ω。CHB-50P测量电阻得到的两相电流信号从TMS320F2812的AD管脚送入片内A/D,转换为电流信号的数字量。对于TMS320F2812,A/D转换的模拟输入电压量程为0V~3.3V,但测量电阻两端电压额定范围是-2V~2V,因此必须对模拟输入电压进行电平转换,使其调整到0~3V范围内。
4.3 电压检查
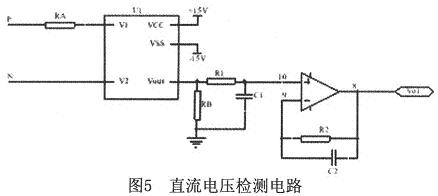
如图5所示,为直流电压检测电路,在系统的工作过程中需要实时检查DIP-IPM模块的P端和N端的电压,根据这个电压可以适当的对算法进行修正。它采用+15V和-15V双电源供电,传感器的前端负载电阻为RA,后端负载电阻为RB,匝数比为3000:1200,如果P和N之间的电压在500V内,RA电阻设定为500K,则前端的电流为1mA。由于匝数比的差异,后端电流为0.4mA,输入到DSP的信号在2V左右,为了满足输入到DSP的电压要在O-3.3V范围内,则RB电阻可以选取5K左右。
5 结论
TMS320F2812和IPM模块都是随着电子技术发展的新型元件,结合TMS320F2812的高速处理能力,以及IPM模块在电力电子产品上的新突破,提供了完整的电流和电压检查电路,为三相电机变频调速提供了方便。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。