供应摩托曼点焊机器人
地区:上海 上海市
认证:
无
图文详情
产品属性
相关推荐
1.6 什么是自由度?这样计算自由度?
人们把构建相对于参考系具有的独立运动参数的数目称为自由度。设一个平面运动链包含N个机构,其中1个构建为机架 则有n-1个活动构件,另外舍友P1个低副和P2个高副。忧郁1个活动构件有3个自由度F 即机构间的地有毒应为F=3n-2P1-P2
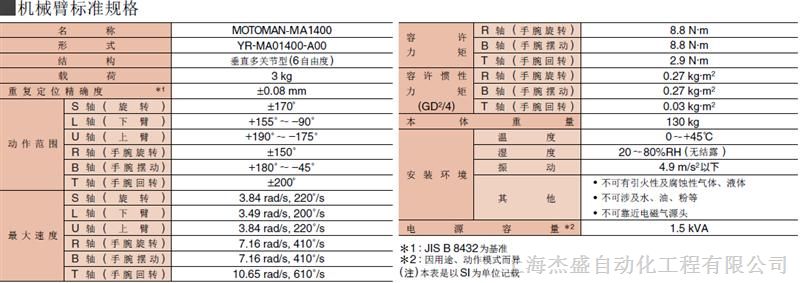
1.7 机器人技术参数有哪些?各参数的意义是什么?
1.8 机器人坐标有哪些?各坐标这样表述?
1.9 机器人参数坐标系有哪些?各参数坐标系有何作用?
机器人可以相对于不同的坐标系运动 在每一种坐标系中的运动都不相同 通常 机器人的运动在全局参考坐标系 关节参考坐标系和工具参考坐标系中完成
我公司代理销售:
安川机器人,安川MOTOMAN机器人,安川焊接机器人,安川焊接机械手,MOTOMAN机器人系统。
日本欧地希(OTC)焊割设备:OTC手工弧焊机,OTC直流氩弧焊机,OTC交直流氩弧焊机,OTC气保焊机,OTC CO2气体保护焊机,OTC铝焊机,OTC空气等离子切割机, OTC焊机配件,OTC焊割易损件,OTC机器人;
唐山松下焊割设备:松下手工弧焊机,松下直流氩弧焊机,松下交直流氩弧焊机,松下气保焊机,松下CO2气体保护焊机,松下铝焊机,松下空气等离子切割机,松下焊机配件,松下焊割易损件,松下机器人;
进口铝焊丝:美国ALCOTEC铝焊丝,SAF铝焊丝,ESAB铝焊丝
不锈钢焊材:京雷焊材
安川机器人,安川MOTOMAN机器人,安川焊接机器人,安川焊接机械手,MOTOMAN机器人系统。
公司拥有专业的技术销售团队,提供技术咨询,销售,安装调试,培训 ,售后一条龙服务.
电缆内置于机械臂内和底座内,从而节省空间。
密度配置,还能轻松回避夹具与工件的干涉。�
以世界最快的动作速度,缩短焊接循环时间。在靠近焊接部分次数
多,机器人移动距离长的工程中,能发挥很大的效果
摩托曼点焊机器人
MA1400
安川YASKAWA
日本