为了实现关节控件的高更新速率和高带宽(高达1000Mbps),需要一种先进的实时控制系统架构。通过提供可促进多个系统组件之间的数据交换的单一高带宽通信标准,基于以太网的系统简化了架构。进一步使用SPE(xBASE-T1)技术(如图1所示)和/或菊花链拓扑可以减小线束的整体尺寸,在更大程度地减轻机器人重量方面发挥着至关重要的作用(重量是人形机器人的一个重要因素,减轻重量可以提高机动性、能源效率和平衡性能)。
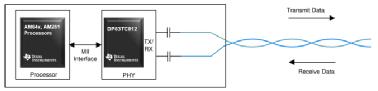
图1 SPE接口
使用单线对以太网PHY推动机器人发展集成IEEE 802.1AS的以太网PHY可以改善人形机器人子系统的实时决策和自适应行为。时间戳处理是在生成或接收数据或事件时使用精确的时间信息标记传入和传出数据或事件的过程。如图2所示,时间戳处理可以在数据路径上的多个位置实现:在以太网PHY的硬件中、在处理器中MAC IP的硬件中或在处理器的软件中。TI的处理器和以太网PHY产品系列可支持全部3种类型的时间戳处理。时钟数据的精度和抖动可能会在毫秒到纳秒之间变化,具体取决于时间戳与电缆的接近程度。以太网PHY是最靠近电缆的元件,在其中进行的时间戳处理可以提高同步精度,因为它解决了数据通过PHY时可能会出现的不确定延迟问题。
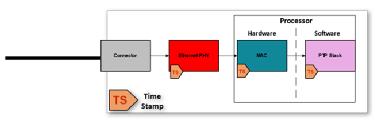
图2可能的时间戳处理位置
GPIO事件捕获或生成精确的GPIO事件计时功能进一步改善了多个电机控制器之间的同步,并且有利于执行需要在子系统之间进行检测和响应协调的任务。DP83TG721S-Q1和DP83TC817S-Q1都能够在PHY硬件(而不是控制器)中创建时间戳和事件触发器。以太网PHY不但可以使用集成的IEEE 802.1AS存储一天中的时间,而且可以使用它以纳秒级精度在其GPIO引脚上捕获事件(图3)或生成事件(图4)。生成的事件可以采用模式形式(例如25MHz时钟实现),也可以采用特定时间的脉冲形式。
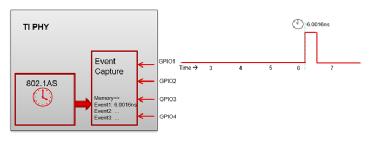
图3使用TI PHY捕获GPIO事件
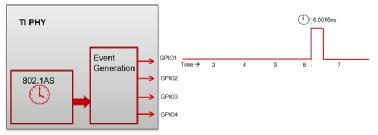
图4使用TI PHY生成GPIO事件
兼具稳定性人形机器人是一个空间受限的系统,其中包含多个电子元件、电机、传动器和电力电子器件,所有这些都可能会产生干扰。因此,管理电磁兼容性(EMC)至关重要,因为电磁干扰(EMI)可能会破坏机器人内部的传感器读数和控制信号。TI的100BASE-T1和1000BASE-T1以太网PHY设计为符合OPEN Alliance EMI/EMC标准,可在汽车市场提供成熟的稳健性,现在,在机器人应用中至关重要。通过使用电隔离的稳健架构来应对噪声(如图5所示),使得TI器件能够符合EMI/EMC的工业IEC和CISPR标准。有关更多详细信息,请参阅单线对以太网的EMC/EMI合规性设计应用手册。
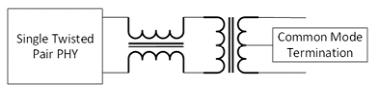
图5电耦合概念
电缆诊断SQI通过评估信号强度、噪声水平和传输错误来监控链路质量,以提供连接健康状况的实时状态。在人形机器人等封闭系统中,SQI可以及早检测信号衰减或不稳定情况,以便进行主动维护,或者确定网络的哪个部分出现问题。任何给定时间的SQI值都存储在寄存器中,可通过简单的计算与信噪比(SNR)相关联。图6显示了SQI值随噪声的增加而增加的示例。

图6 SQI示例
TDR可识别整个电缆长度范围内的故障(例如短路或开路),以及与PHY的距离。图7(Buntz和Daimler AG,2017)显示了可使用TDR功能检测到的不同类型的故障。这种诊断方法对于精确定位电缆中故障的确切位置非常有用。

图7电缆中可能出现的故障
如图8所示,TDR的工作原理是向电缆中注入高能脉冲并测量反射信号(同相、异相或无脉冲)。当PHY之间没有有效链路时,通常会运行TDR测试来查找根本原因。
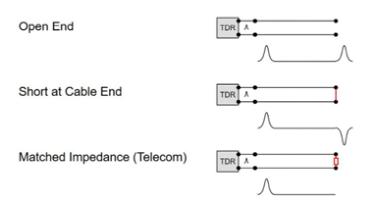
图8 TDR概念
在人形机器人中使用时,这些强大且高效的故障隔离工具可以提高整体系统可靠性并延长正常运行时间。在人形机器人中,SPE用于点对点或菊花链配置,以连接用于在各种子系统之间协调运动的电机控制器。通常采用基于网关的架构来管理多个控制器和电机子系统。借助ASM+DP83TC812S-Q1(100BASE-T1 SPE PHY)评估模块,TI展示了多节点实时系统如何实现60ns抖动性能,从而实现确定性且可预测的系统行为。有关测试设置的更多信息,请联系TI。
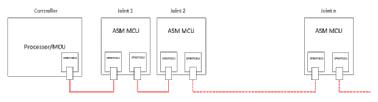
图9特定于应用的MCU和100BASE-T1 SPE PHY评估模块
总结免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。