PWM(脉冲宽度调制)是一种广泛应用于电机控制领域的调制技术。它通过调节脉冲信号的占空比,实现对电机转速的控制。在电机控制中,PWM 信号经过处理后可直接驱动
功率管,以此来实现对电机的有效控制。下面将详细介绍 PWM 控制电机的几种模式及其特点。
- 双极模式
双极模式下,电枢电压极性呈正负交替状态。其优点十分显著,能够实现电机的正反转运行,启动速度快,调速精度高,动态性能良好,调速静差小,调速范围大,还具备加速、减速、刹车、倒转等功能。在负载超过设定速度时,能提供反向力矩,并且可以克服电机轴承的静态摩擦力,实现非常低的转速。然而,该模式的控制电路较为复杂,这在一定程度上增加了系统的设计难度和成本。 - 单极模式
单极模式中,电机电枢驱动电压极性单一。它具有启动快的特点,能够实现加速、刹车以及能耗制动和能量反馈。虽然其调速性能稍逊于双极模式,但差距不大,电机特性也较为良好。若接成 H 桥模式,同样可以实现电机的反转,在负载超速时也能提供反向力矩。不过,该模式存在一些局限性,刹车时无法将速度减速到 0,当速度接近 0 时没有制动力,也不能突然倒转,动态性能欠佳,调速静差稍大。 - 受限单极模式
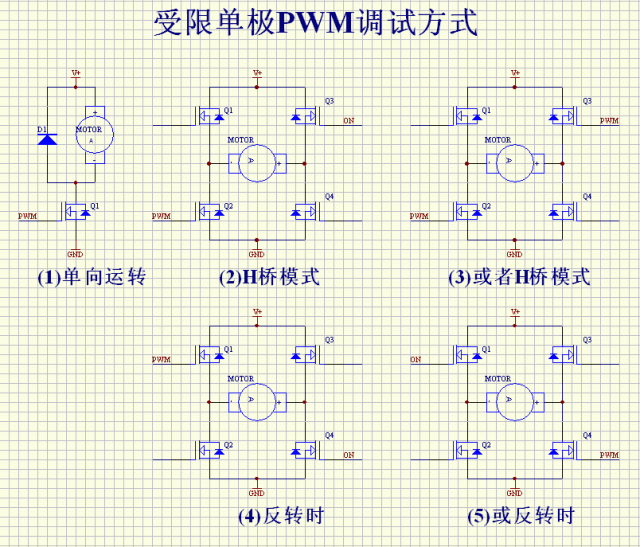
受限单极模式除了采用单极调制外,能耗制动通路受到限制。其优点是控制电路简单,若接成 H 桥模式也能实现正反转。但缺点也较为明显,不能进行刹车和能耗制动,在负载超过设定速度时无法提供反向力矩,调速静差大,调速性能差,稳定性也不好。
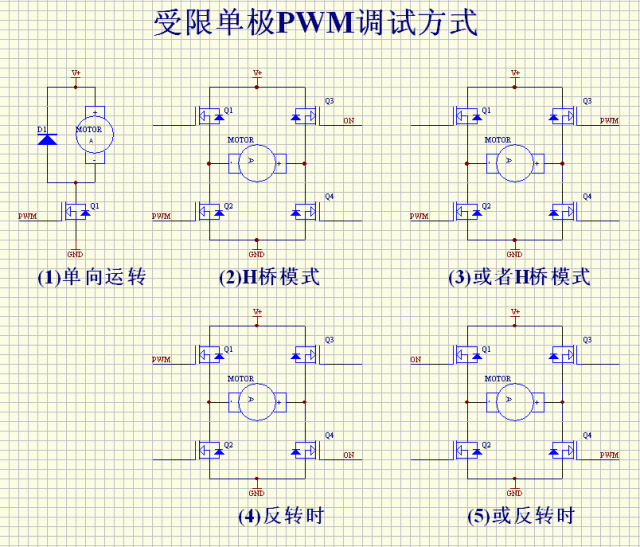
图 1:受限单极模式相关图示
在实际应用中,受限单极调制模式较为常见,它只有加速和调速功能,没有刹车功能,电机速度下降主要依靠负载摩擦,也没有负力矩。例如,以前的有刷电动自行车就采用这种控制方法,虽然速度控制不够,但能满足基本需求。
若要实现电机的正反转,常采用类似图 2 和图 4 的接法,虽接成 H 桥样子,但实际上还是受限单极调制。把图 2 中的 Q4 拿掉,Q1 变成一个
二极管,电路就又变成了图 1 的样子。
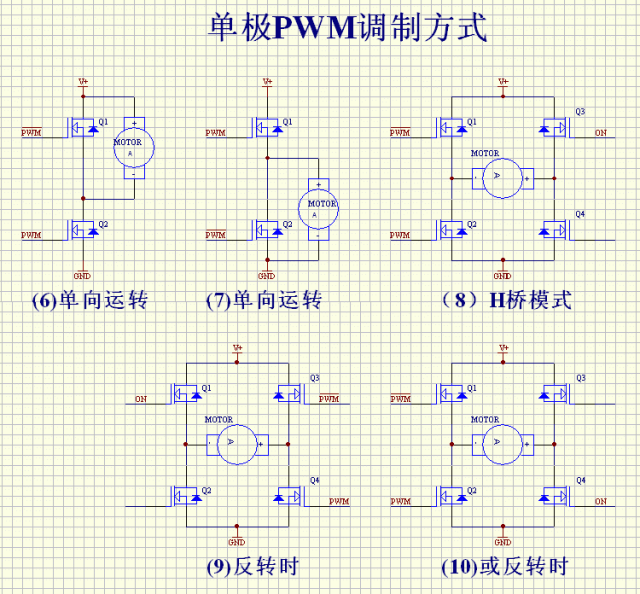
图 2:单极调制与双极调制相关图示
若想让电机具备刹车功能,必须使用一个与 PWM 信号互补的 PWM 信号。该信号在 PWM 关断期间,为电机提供一个续流通道,类似于
开关电源的同步续流,也被称为同步整流。与二极管相比,使用 MOS 管作为续流通道有两个明显优势:一是导通压降低,发热少,效率更高;二是二极管上不能产生反向电流,而 MOS 管可以通过反向电流。当电机反电动势在 PWM 关断时间的伏秒数大于电源电压在 PWM 开通时间加在电机上的伏秒数时,电机会产生反向电流,从而产生反向力矩,实现电机的减速或刹车。而且,电机上的反向电流还会在 PWM 开通时间回馈到电源中,实现能量回馈。不过,如果电源不是二次
电池,会使母线电压升高,需要采取一些能量消耗的措施。
PWM 的占空比能够控制电机的转速,占空比加大,电机加速;占空比减小,电机减速;若减得快,就相当于刹车,控制得当可实现迅速而柔和的刹车效果。但如果占空比突然减到 0,相当于把电机短路,属于急刹车,是否损坏电机取决于电机的内阻、功率、惯性以及功率管的过载能力,同时也考验电机的机械强度。更急的刹车办法是把电机切换到反向运行状态,但这种方法有很大隐患,容易造成器件损坏。因此,如果需要电机带刹车功能,应尽量使用单极调制或双极调制,避免使用受限单极调制模式,如一般电动轮椅的电机就采用这种合适的模式控制。
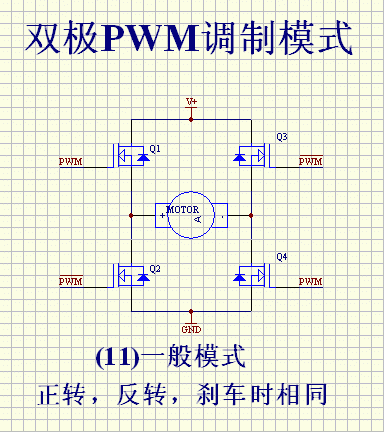
图 3:双极模式相关图示
双极模式只有 H 桥一种接法,且 4 只管子同时工作。斜对角的两个管子通相同相位的信号,另外两只管子用与之互补的信号驱动。在 PWM 导通期间,电机两端的驱动电压为正;在 PWM 关断期间,电机两端驱动电压为负。当 PWM 占空比为 50% 时,电机并非静止,而是在原地抖动,因为电机上的电流是交流的,这种抖动能有效克服电机的静摩擦,使电机能快速启动,迅速反应,适用于需要动态性能好的场合,如光驱里面控制光头前后移动的电机、直流伺服电机以及二轮小车驱动车轮的电机等。
此外,单极和双极调制也可以将 4 只管子都关断,使电机自由减速,而不是依靠反向力矩来减速。
综上所述,PWM 控制电机在不同模式下具有各自的特点和适用场景。在实际应用中,需要根据具体需求合理选择控制模式,以实现电机的高效、稳定运行。同时,PWM 输出频率一般为几千赫兹,可有效抑制电机的噪声和震动,通过调节占空比来调节直流电压,从而控制电机转速。