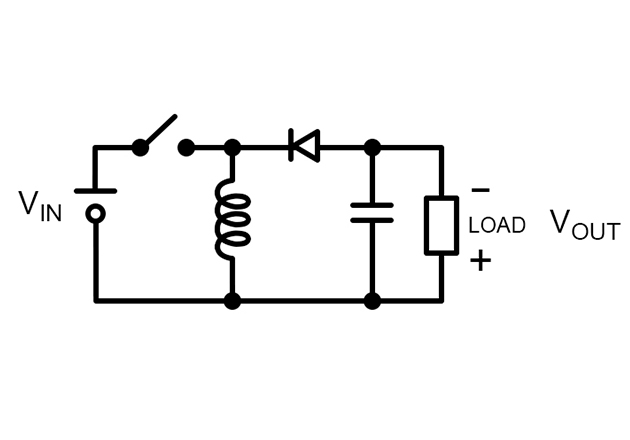
降压拓扑是简单的。它生成的输出电压低于输入电压,并且可以在“反向”版本中设计: 雄鹿拓扑
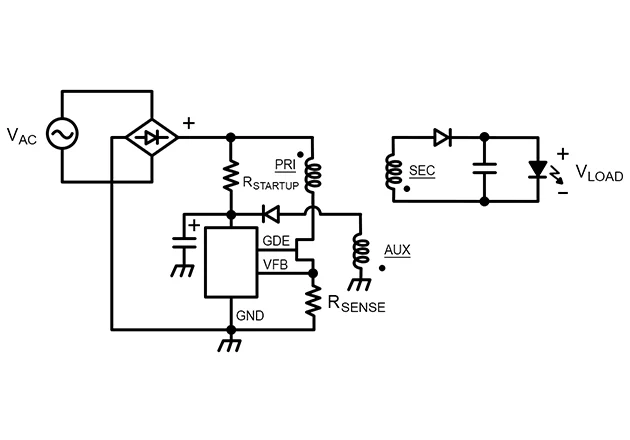
图1A。雄鹿拓扑 反向拓扑

图1B。反向拓扑
| v in | > | V OUT | 图1A的电路对于来自直流电压源的LED驱动器(通常是电池)非常受欢迎。以下示意图显示了来自直流源的典型降压LED驱动器电路:
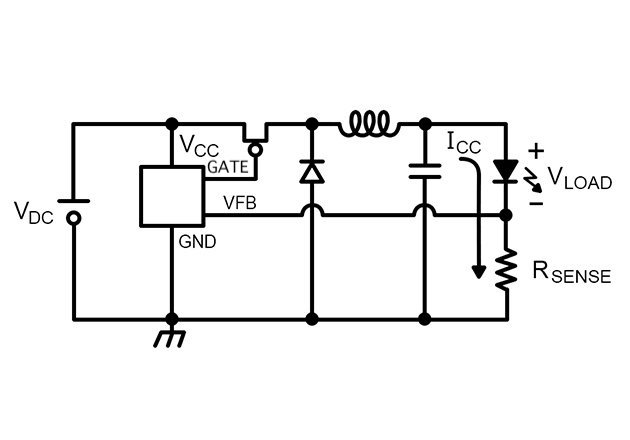
图2。DC-BUCK LED驱动程序
驾驶员从输入电压供电并驱动PMO。带有LED负载的串联
电阻器会产生与负载中电流成正比的电压VFB,并且该电压用于使驱动程序的电流反馈。为了获得LED负载中所需的电流,PMOS的门是驱动的。
在此电路中,感应电阻是地面引用的,这使得当前的反馈易于从驾驶员那里测量。
PMO的源终端直接连接到VIN,因此很容易驱动GND和VIN之间的门切换。
在存在高输入电压的AC应用中,由于VSG非常高,因此PMOS的门不能在切换周期内驱动到GND,远超过MOSFET的等级(typ。20V)。 因此,使用图1B的电路,即反向堆积的电路,这是通过简单地将
开关从输入的正末端移动到负
端子来得出的。以这种方式,可以使用NMO,并且可以通过以下几种构造的回顾电路来驱动其门:
交流电击的LED驾驶员
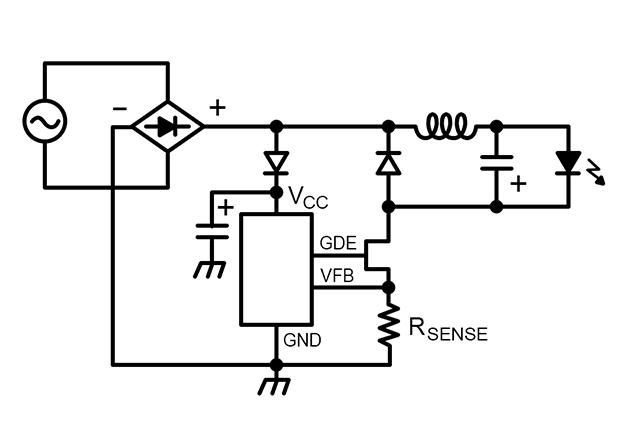
图3。Ac-Reverse-Buck LED驱动器
驾驶员通过整流器从桥梁输出中取电,因此其VDD几乎为直流。它驱动了NMO的门,在此拓扑结构中,将感觉电阻放在NMO的源端子上,因此仍被引用。 重要的是要注意,由于感官电阻器与NMO串联放置,因此在该电路中,反馈在输入电流上,而不是在LED电流上。这会导致较差的发光磁通调节,但允许驱动NMOS以与输入电压相相位塑造平均输入电流,从而获得高PF(功率因数)。
为了地减少这种效果,通常使用反向弹药驱动电压<50V的LED串,因此,LED不驱动的正弦波的一部分可以忽略不计。
促进 增强拓扑产生的输出电压高于输入电压:
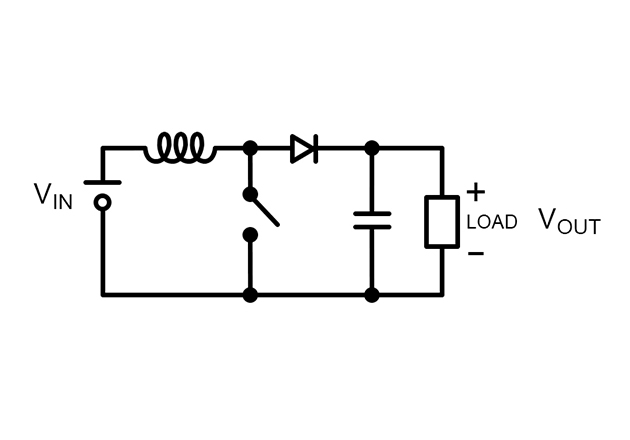
增强拓扑
图4。促进拓扑
| v in | <| V OUT |
该拓扑通常用于从单个电池电池(即3.7V)的多个LED供电。电池的电压低于总LED串电压,因此必须使用直流升降LED驱动器: DC-Boost LED驱动程序
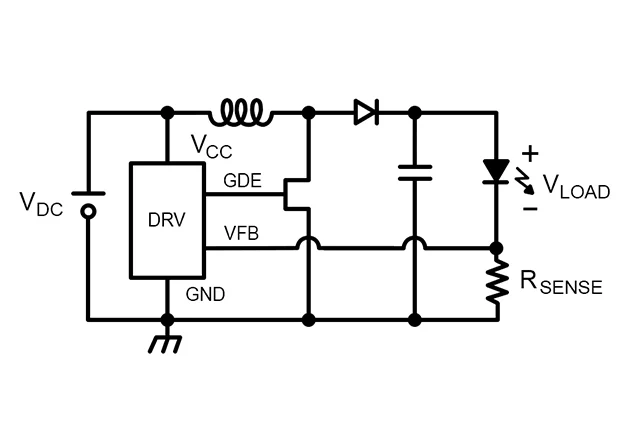
图5。DC-boost LED驱动程序
在此电路中,NMOS的门可以很容易地从驾驶员中驱动,感官电阻是引用的,并且可以直接从直流输入中驱动驱动器。满足简单驱动程序的所有基本要求,没有任何“反向”版本。
AC LED驱动器通常不使用增强拓扑,因为LED字符串的输出电压通常低于AC输入电压。
Buck-Boost(逆变器)和反向式增压
当输入电压可以在输出电压上方或下方摆动时,使用降压拓扑。它能够像降压或提升一样工作,具体取决于输入电压的幅度,这就是为什么它被称为Buck-Boost:
降压拓扑 图6a。 降压拓扑
反向式增压拓扑
图6b。反向式增压拓扑
| v in | > | V OUT |或| v in | <| V OUT |该电路的特殊条件是输出电压为负,因此,它也称为逆变器拓扑。在LED驱动器世界中,输出电压为负的事实并不是重要的问题,因为输出LED字符串可以始终相应地连接到驱动器输出极性。
对于降压拓扑,还存在“反向”版本,该版本将从输入电压的正端子移动到负值。
与Buck拓扑类似,对于DC LED驱动程序,标准版本(图10A)将是优选的,但实际上,它不使用它,因为它将在sense电阻器上也会产生负电压,并且应从驱动程序中读取该负电压作为输出反馈。对于驾驶员而言,很难用负面反馈来管理。
取而代之的是,“反向”版本对于AC LED驱动器非常有用,因为它允许在AC输入电压的整个周期内生成所需的输出电压。没有显示AC Buck LED驱动器的限制(正弦波周期的一部分,驾驶员无法驱动输出): AC-Reverse-Buck-Boost LED驱动器
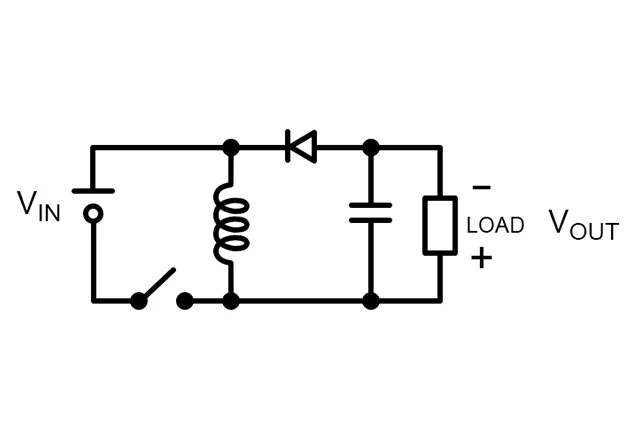
图7。交流反向弹药驱动器
对于AC-BUCK LED驱动器,该电路能够制作PFC(功率因数校正),因为传感电阻与NMO串联,并且输入电流的反馈使得与输入电压相相的平均输入电流可以形成平均输入电流。
在Flyback拓扑中,设计人员可以根据项目规格配置电路以生成可能高于输入电压的输出电压。 基本的反射拓扑可以通过用
变压器代替电感器来源自提升:
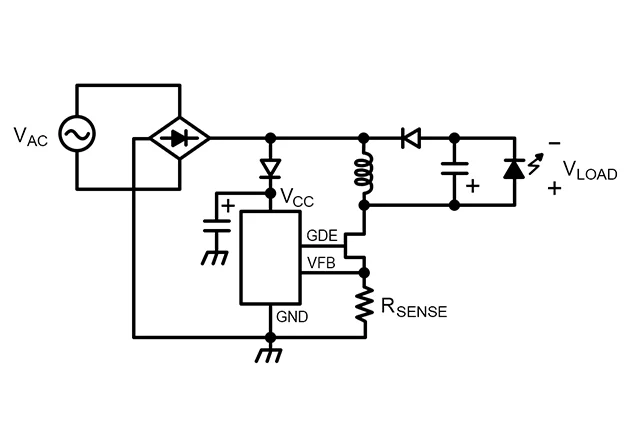
图8。飞回拓扑
该电路分为两个阶段。在阶段,开关已关闭,并为变压器的主要绕组的电感LP充电。次级绕组LS具有相反的极性,使
二极管处于反向极化,在这种情况下,次级绕组中没有任何电流流动。在第二阶段,开关是打开的,先前存储在变压器中的能量必须释放。因此,次要绕组使二极管转发传导。
输出电压可以通过开关的占空比和变压器的转弯比NP/NS确定。
由于Flyback使用了变压器,因此它具有从输入中电气隔离的载荷的独特功能。对于AC LED驱动器而言,这通常是一个重要的功能,通常需要进行电气隔离: AC-Flyback LED驾驶员

图9。AC-Flyback LED驱动程序
在一个真正的反式示意图中,有第三个绕组(称为Aux绕组)具有相同的次级绕组的极性。通常,它是一个低压和低电流绕组,目的是在系统启动后为驾驶员提供电源电压。电阻R R启动提供了驾驶员要求的低电流,直到辅助绕组将供电为止。
此外,反激发运动也可以像先前说明的AC LED驱动程序一样使PFC成为PFC。
在对每个拓扑分析进行分析之后,下表将它们比较,考虑到LED驱动程序设计师通常考虑的主要因素(在本文开头列出):
表1。拓扑比较。
| | 巴克
倒车 | 促进 | 降压反向
降压
助力 | 飞回来 |
| 电压 | | v in | > | V OUT | | | Vin | <| Vout | |
在|之间摆动Vin | > | Vout |或
| Vin | <| Vout | | 固定在
|之间Vin | > | Vout |或
| Vin | <| Vout | |
| 电路尺寸 | 小的 | 小的 | 小的 | 大(变压器) |
| 组件计数 | 低的 | 低的 | 低的 | 中等的 |
| 绝缘 | 不 | 不 | 不 | 是的 |
| PFC(交流驱动程序) | 是的 | 不 | 是的 | 是的 |
| 效率 | 中/高 | 中/高 | 中/高 | 中等的 |
| 设计简单 | 简单的 | 简单的 | 简单的 | 中等的 |
| 成本 | 低的 | 低的 | 低的 | 中等的 |