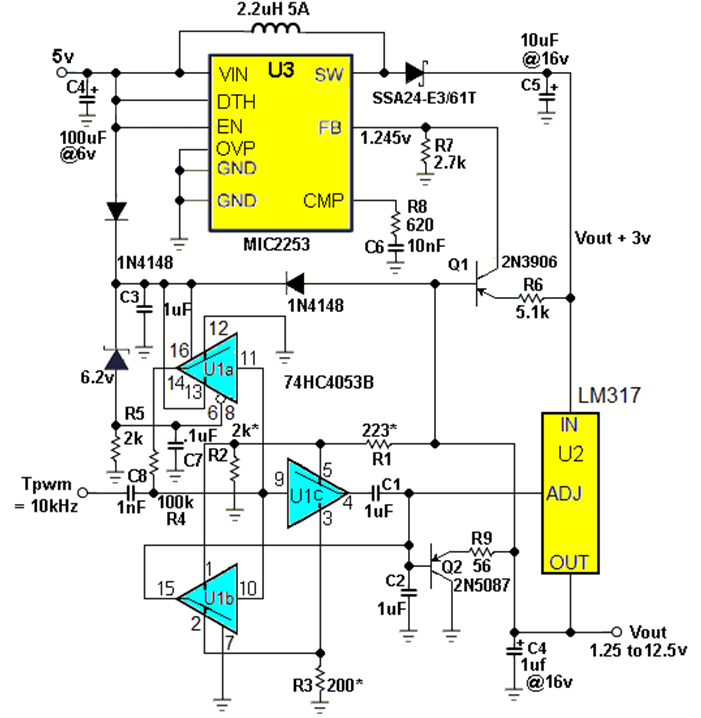
图1 LM317和HC4053合并以使PWM功率DAC,而Q1则强迫前凝管U3跟踪和维持恒定的3V U2 I/O净空差速器以提高效率。
如较早的DI中所述,
开关U1B和U1C接受10 kHz PWM信号,通过反馈网络R1,R2和R3生成U2
调节器的0V至11.25V“ adj”控制信号。传入的PWM信号是AC耦合的,因此U1可以在U2的输出上“浮动”。 U1C提供了PWM信号的平衡倒数,如“取消模拟扣除的PWM DAC纹波”中所述实现了主动波纹取消。
请注意,R1 || R2 = R3以优化波纹减法和DAC精度。这种反馈安排使U2的输出电压遵循PWM占空比(DF)的功能:
vout = 1.25 /(1 - df(1 - r1 /(r1 + r2)))= 1.25 /(1 - 0.9 df), 如图2所示。
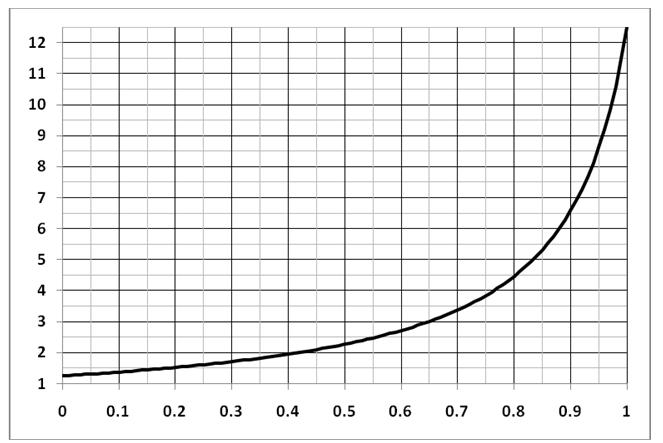
图2 VOUT(1.25V至12.5V)与PWM DF(0至1),其中VOUT = 1.25 /(1 - 0.9 df)。 图3绘制了图2的倒数,产生了任何给定Vout所需的PWM DF。
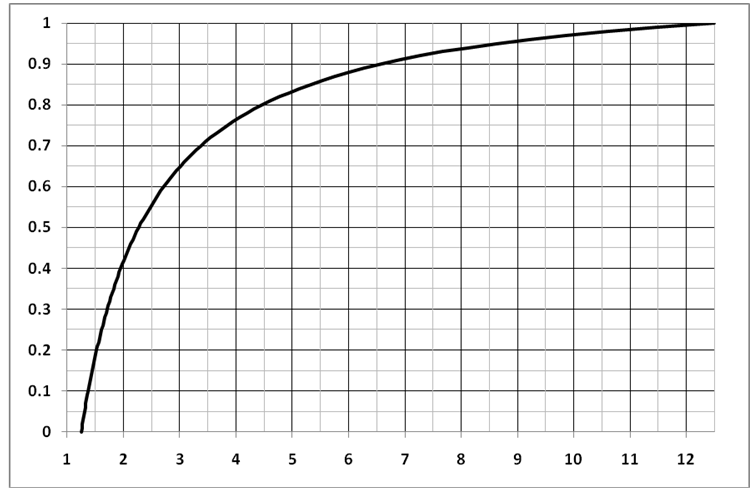
图3图2的倒数或任何给定Vout所需的PWM DF,其中PWM DF =(1.111 - 1.389/vout)。
关于跟踪前调节器的内容:对U3的控制,以维护固定U2免受辍学所需的3V净空,依赖于Q1充当一个简单(但足够的)差分
放大器。 Q1驱动U3的VFB电压反馈
引脚保持VFB = 1.245V。因此(其中vbe = q1的发射极基偏见):
VFB/R7 =(((U2in - U2OUT) - VBE)/R6
1.245V =(U2IN - U2IN - U2OUT - 0.6V)/(5100/2700)
U2in - U2in - U2OUT = 1.89 * 1.245V + 0.6V + 0.6V = 3V = 3V
同时,推论Q2的作用是为了敏锐的读者的练习。提示:它节省了在Vout = 12V处的原始DI上的瓦数的三分之一。
请注意,如果您想将此电路与不同的先前调节器一起使用不同的VFB,只需调整:
R7 = R6 VFB/2.4