浪涌电流对电源造成限制,并由于加电时初始电流的巨大浪涌造成过应力而影响可靠性。限制浪涌电流的已知解决方案 [1]、[2] 需要电阻器或传统的 NTC
热敏电阻,这会导致显着的功率损耗并降低效率。
我们的方法 [3] 说明了数字功率控制的优点,克服了现有技术的许多缺点,并提高了人们对高功率转换器数字控制的兴趣,从而刺激了下一代这些设备的开发。 IXYS 的高功率数字浪涌电流控制器 (HPDICC) 是开发这种新方法的第二步,已针对高达 10A 的负载电流进行了测试。工业AC-DC、DC-AC电源,例如额定值≤5kW的电池充电器、电机驱动器和
太阳能逆变器,可以实施这种设计来控制大浪涌电流。
IXYS 高功率数字浪涌电流控制技术扩展到高电流水平,同时还引入了具有单片集成电流感应镜和两个温度感应
二极管的大电流功率 MOSFET (MMIX1T132N50P3)。该设计利用 Zilog 的 8 位 Z8F3281 MCU 和其他 IXYS 组件,例如整流器和驱动器 IC。
主要优势
高功率数字浪涌电流控制器具有以下优点:
高效解决方案,包含少量组件,预充电完成后可重复用于其他目标;例如,在 PFC/升压转换器中,将使用相同的电感器、输出电容器和 MCU。
可扩展设计,可通过更换一些关键组件并进行少量软件修正来调整至所需的浪涌电流。
易于复制的设计,无需从一个样品到另一个样品进行任何调整即可获得预期结果和效率。 该浪涌控制器经过测试,负载电流高达 10A。由于设计中使用的功率MOSFET的额定电流为120A并且不存在用于主电流的串联电流检测电阻,因此负载电流可能会大幅增加。为了将负载电流增加到超过 10A,设计人员需要更改电流镜传感器电阻器、
桥式整流器和电感器,以与增加的额定电流兼容。
图 1 显示了一个电路原理图,其中的关键思想是以相等的增量向大容量电容器提供电荷。电容器 (C) 由根据时间相关脉冲序列驱动的功率 MOSFET (SW1) 充电。脉冲序列设计用于在电容器上提供相等的电压增量,并在每个周期将充电电流峰值保持在大约相同的值。周期数取决于电容器的值,该值根据输出端纹波电压的所需幅度进行选择。充电电流是脉冲数量和相对于整流正弦波的定时位置的函数。
图 2 显示了 SW1 的典型脉冲序列。如果我们考虑 N 个周期进行浪涌控制,那么我们可以将半整流正弦波的归一化幅度分成 N 段,增量为 1/N。在周期 1 期间,SW1 从时间戳 t1 到 T 处于 ON(导通)状态,允许电容器 C 充电至与归一化值 1/N 成比例的电压。充电电流不会立即上升,因为它是串联LC谐振电路中的电流。这将电流波形塑造为谐振波形。电流不断上升,直到电容器电压达到输入电压。
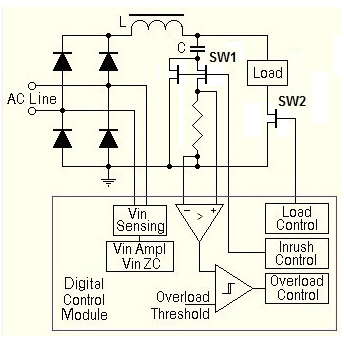
图 1:数字浪涌控制器的电路原理图
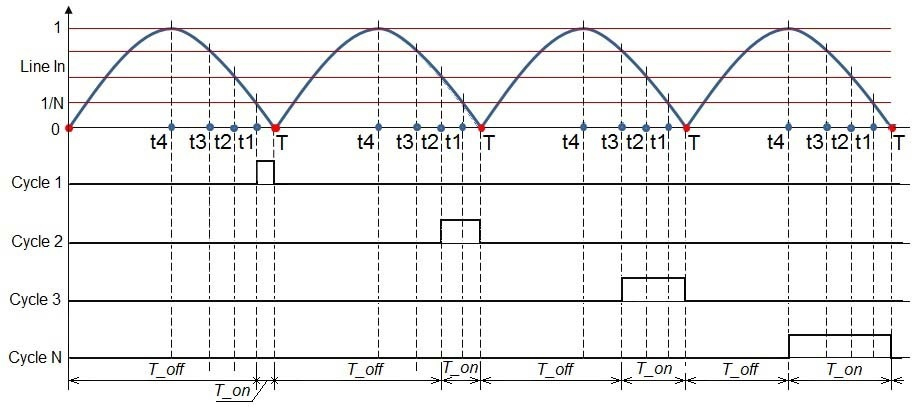
图 2:数字浪涌控制时序
然后电流继续其谐振行为,因为 SW1 仍在导通。由于输入电压低于电容器上的电压,因此不再发生振荡,然后 SW1 关闭(不导通)。电容器保持预充电至与 1/N 成比例的电压。在周期 2 中,电容器 C 通过另一个电压增量 1/N 进行预充电,过程与周期 1 类似。电容器 C 被充电 N 个周期,达到与输入线电压成比例的电压值。
工作原理
该浪涌控制器采用[3]中描述的基本工作原理。该参考设计的主要区别在于使用了具有更高额定功率的组件以及控制负载电容器预充电的脉冲串的适当变化。脉冲串旨在将预充电电流限制在所用组件额定值可接受的水平。在此特定设计中,限制组件是电感器 AGP4233-223ME,在 20% 电感降时额定电流为 35.4 A。
每个预充电脉冲的定时位置由以下公式给出: Ton(i)=Tπ2?asin(iN),“其中”i=1...N 相邻脉冲的定时位置的增量定义了施加到大容量电容器的充电电压的幅度。增加脉冲数 N 会减少增量,从而减少充电电压的阶跃。在此示例中,N= 255,导致电流限制为 34 A,电容器值为 3000 ?F。
电容器的电压和充电电流曲线图如图3所示。预充电电流的幅度在充电周期结束时下降,而电容器的电压线性上升。它由电流脉冲相对于整流电压的半正弦波形的定时位置确定。在充电周期结束时,预充电脉冲的持续时间更长,电流幅度更小,这在大容量电容器上产生了与开始时相同的电荷,并且导致整个周期期间电容器的电压阶跃相同。
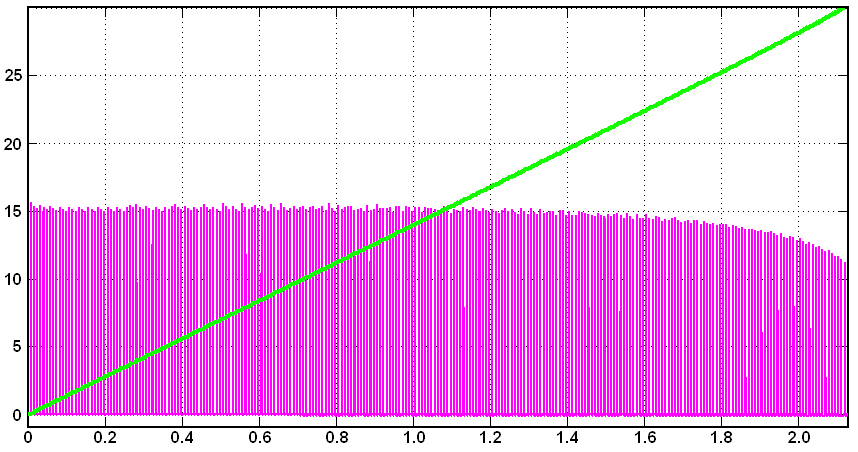
图 3:电容器上的电压和预充电电流。图例:绿色 – 电容器上的电压 (50V/div),洋红色 – 预充电电流 (5A/div),x 轴:过载保护时间
为了显示 IXYS 电源组件的功能,该设计包括负载 ON/OFF 开关 U3(参见图 6)、过载保护功能和电源良好状态输出。负载开关激活是可编程的,并且在电容器C预充电完成后启用。在当前的参考设计中,负载开关通过电源良好状态信号激活。
过载保护是一项关键功能,可保护设备在过载期间免遭损坏。过载阈值是可编程的,在当前参考设计中设置为 12A。
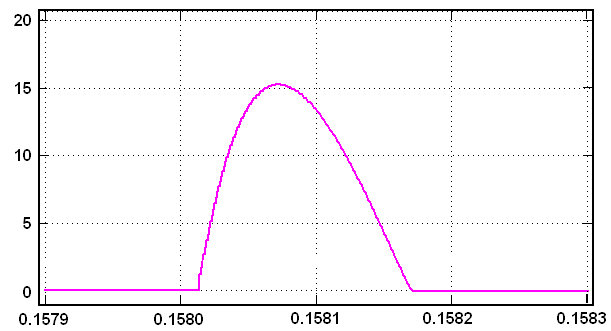
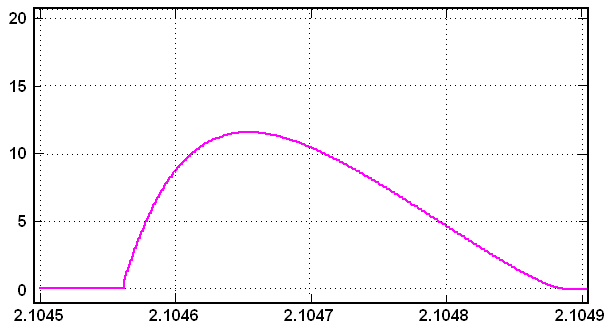
图 4:(a) 充电序列开始时的预充电电流和图 4(b) 充电周期结束时的预充电电流。图例:绿色 – 电容器上的电压 (50V/div),洋红色 – 预充电电流 (5A/div),x 轴:500ms/div
如果比较器检测到过载,MCU 会通过关闭 U2 和 U3 开关来断开负载。
过载保护可针对两种操作模式进行编程:
立即关闭设备并等待用户操作
如果短路发生重复,允许设备在短路发生预定次数后重新启动
在第二种操作模式中,重新启动之间的延迟和重新启动的次数是可编程的。在本参考设计中,延迟时间设置为1.5秒,重启次数设置为4次。
电源良好状态激活是可编程的。在此参考设计中,电容器预充电完成后延迟了 2 个周期。如果检测到过载情况,则不会设置电源正常状态。
硬件实现
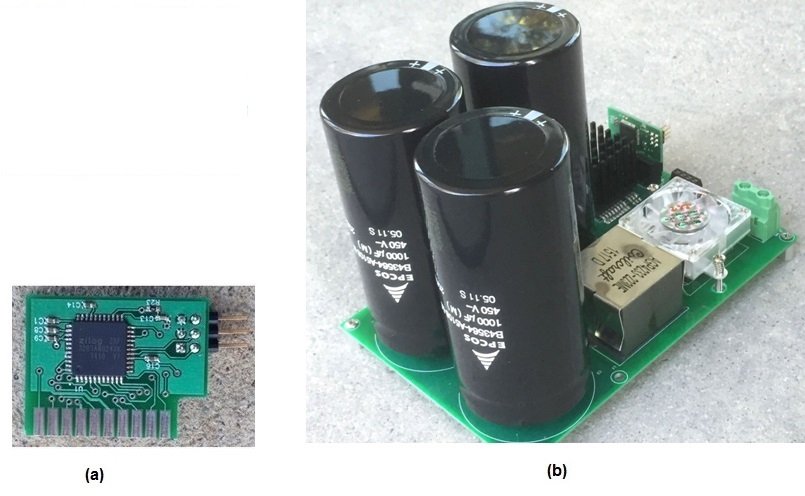
该浪涌电流控制器由 MCU 模块和主电源板组成,如图 5 所示。详细电路原理图如图 6 所示。MCU 模块作为附加设备实现,带有用于 MCU 编程的连接器。应在为整个系统供电之前对 MCU 进行编程。 MCU 模块由辅助电源供电:+3.3V 用于 MCU,12V 用于栅极驱动器,应用于主电源板上的连接器 J4。
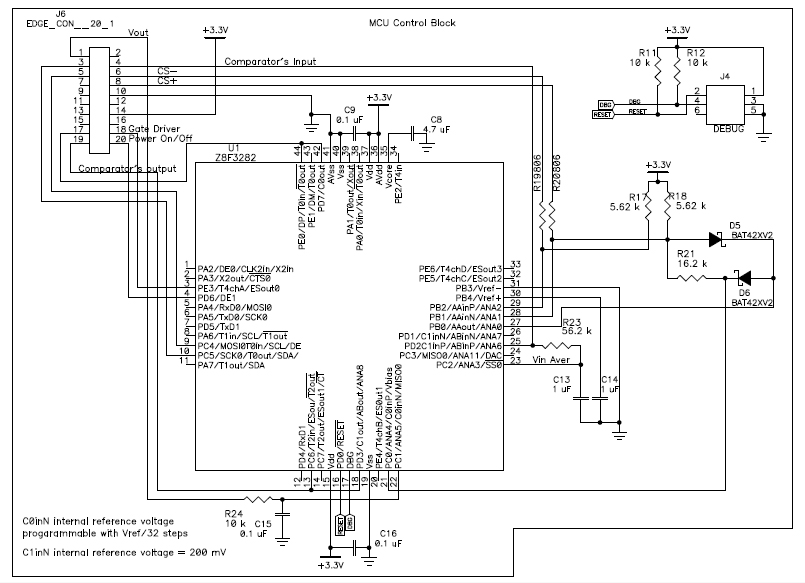
图 6(a):MCU 模块原理图
主电源板由多个组件组成,包括二极管桥 BR1、功率 MOSFET U2 和 U3,如图 6 (b) 所示。 MOSFET U2电流镜用作电容器充电/放电电流测量的信号源,因此主电流路径中没有电流检测电阻,从而提高了系统效率。在输出功率为 3000 W 时,这些 MOSFET 的功耗小于 5 W。该板可由 50 Hz 或 60 Hz 120V 或 240V 交流电源供电。
测试数字浪涌控制器
该设计经过编程,其性能在测试台上得到验证。交流线路输入通过 2 kW 隔离变压器馈送,以保护操作员和测试设备。 正常运行期间负载设置为 10A。为了测试过载情况,添加了额外的负载以将负载电流增加到 12A。瞬时连接额外负载足以触发过载保护。持续过载导致多次尝试重新启动设备,并在负载电流达到 12A 阈值后立即中断。图 7 描绘了正常操作时从示波器获取的实际波形。
浪涌电流(红线)限制为 16A。蓝线显示 U2 栅极处的信号。浪涌过程完成后,栅极被设置为高电平以保持U2导通。然后将负载连接到预充电电容器。连接负载后,由于隔离变压器和电网的阻抗,整流电压会出现下降。
正常操作从大容量电容器的预充电开始。当 MCU 检测到过载情况时,正常操作会中断,U2 和 U3 开关会关闭。每隔 1.5 秒就会尝试重新启动设备。如果过载情况持续,设备将再次关闭。尝试次数是可编程的,在此设计中设置为 4 次尝试。
负载功率为1kW时,测得HPDICC的效率为99.4%,功率损耗为6W。功率损耗是从二极管整流器到负载计算的。
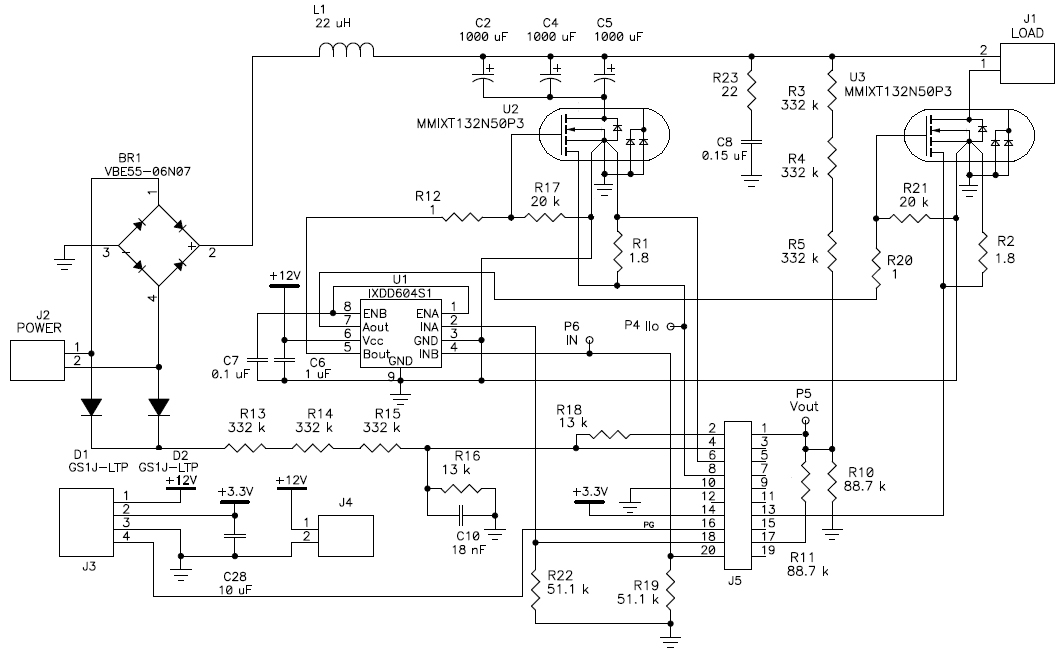
图 6 (b):主电源板
应用领域
该浪涌控制器可用于开发多种应用,包括用于重型无刷电机的 AC-DC 整流器、航空航天应用中使用的自耦变压器整流器 (ATRU) 和变压器整流器单元 (TRU)、高功率电机驱动器、A??C-数据中心直流电源、电池充电电源。它还可以集成在高电容负载中,例如以并联运行模式运行的 AC-DC 电源。
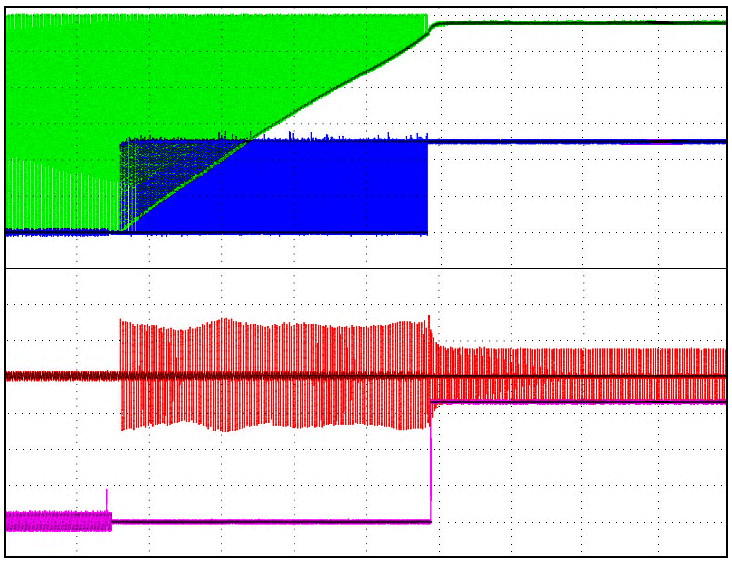
图 7:数字浪涌电流控制的示波器快照。图例:红色 –
电源线电流 (10A/div),绿色 – 负载电压 (50V/div),洋红色 – 电源正常状态信号 (1V/div),蓝色 – U2 控制信号 (5V/div),x 轴: 500 毫秒/格。
结论 IXYS 的 HPDICC 可以灵活地实施独特的控制算法,有助于开发高效的电力系统。它在各种负载下实现了更高的稳定性、高效率和可靠的性能。由于采用创新的电流测量算法,它允许公共输入和负载接地。用户可以针对各种输入电压和频率来优化器件。