误差放大器
每个
开关模式电源都有一个集成误差放大器。这可以是如图 1 所示的普通
运算放大器,也可以是跨导放大器。功能始终相同,并且输出电压调整的实现也可以以相同的方式完成。误差放大器将反馈分压器 (VFB) 的电压与其内部参考电压 (VREF) 进行比较,并设置占空比 (PWM),使差值为零。由于参考电压通常在几百毫伏到一伏的范围内,因此输出电压由反馈分压器(R1、R2)分压。在误差放大器的输入(FB)和输出(COMP)之间连接有补偿网络。如果设计得当,它可以确保在所有线路和负载条件下对输出电压进行良好的调节。

图 1:误差放大器
这些外部组件通常是固定的,因为转换器是针对不变的输出电压而设计的。通过使用定义的
电阻器 (R3) 将外部电压 (VADJ) 施加到误差放大器的反馈,会注入额外的电流,该电流通过低侧电阻器 (R2) 流向 GND,从而产生额外的压降。这意味着,运算放大器输入 (FB) 上的电压上升,误差放大器降低占空比,使其回到参考电压值。这种方法称为“模拟”,因为模拟电压用于调整输出电压。实施得好,电源的输出电压与模拟调节电压成正比。
一个简短的示例显示了三个电阻的计算。
输出电压:VOUT min = 5.0V
输出电压:VOUT max = 12.0V
调整电压:VADJ min =0.0V
调节电压:VADJ max =3.3V
参考电压:VREF=0.6V
当 VADJ 设置为 0.0V 时,电阻器 R3 实际上与 R2 并联。这意味着输出电压达到值。当 VADJ 设置为 5.0V 时,电阻器 R3 产生附加电流,该电流叠加到 R1 的电流上。在这种情况下,输出电压达到值。请务必记住,输出电压受参考电压限制,不能低于该值。
这三个电阻可以通过四个步骤轻松确定:
首先,需要选择流经高侧电阻器 R1 的电流 (I R1,min )。非常低的电流容易受到噪声的影响,而非常高的电流会导致不必要的损耗。典型值为 100μA,本例中也使用该值。
现在,计算分压器的高侧电阻。
`R_1=(VOUT_("min")-VREF)/I_(R1,min)`
`R_1=(5.0V-0.6V)/(100μA)=44.0kΩ`
选择接近的值 44.2 kΩ。
下一步是电阻器 R3 的计算,该电阻器将外部电压与误差放大器的反馈连接起来。
`R_3=(R_1"VADJ"_("max"))/(VOUT_("max")-VREF-R_1I_(R1,min))`
`R_3=(44.2 kΩ3.3 V)/(12.0 V-0.6 V-44.2 kΩ100 A)=20.9 kΩ`
选择接近的值 21.0 kΩ
由于 R1 和 R3 已知,因此可以确定缺失的电阻器 R2。
`R_2=(R_1R_3VREF)/(R_3VOUT_("max")-R_3VREF-R1VREF)`
`R_2=(44.2 kΩ21.0 kΩ0.6 V)/(21.0 kΩ12.0 V-21.0 kΩ0.6 V-44.2 kΩ0.6 V)=2.62 kΩ`
选择接近的值 2.61 kΩ。
用于调节电源输出电压的外部电压可以通过多种方式产生。常见的是使用平滑的 PWM 信号或数模转换器 (DAC) 的输出,如图 2 所示。 模拟电压产生
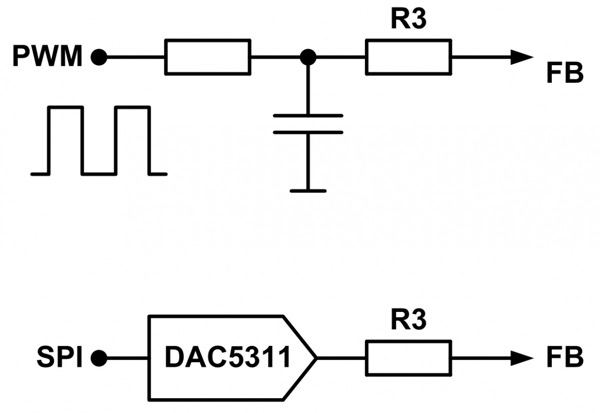
图 2:模拟电压生成
种方法经常被使用,因为它非常简单且便宜。如果需要可调输出电压,通常系统中的某个地方都会有一个微控制器。具有脉宽调制 (PWM) 功能的输出会生成矩形波形,由低通滤波器对其进行滤波,将其转换为平均直流电压。为了实现平滑的模拟电压,低通滤波器的带宽应比 PWM 信号的频率低十倍或更小。可调输出电压的步长直接取决于 PWM 信号的分辨率。
另一种方法是使用 DAC,例如 DAC5311。如果需要不同的可调电源轨并且微控制器上的 PWM 输出量有限,则可以通过 SPI 总线并行控制多个数模转换器。这里步长还取决于 DAC 的分辨率。该系列数模转换器提供 8 位 (DAC5311) 至 16 位 (DAC8411) 的分辨率,因此可以满足有关开关模式电源的可调输出电压分辨率的任何需求。
数字化方法
对于“数字”方法,使用微控制器输出等数字信号直接改变电源的输出电压,而无需绕过 DAC 等。这背后的想法非常简单。通过改变高侧电阻器 (R1) 或低侧电阻器 (R2) 的电阻,可以控制输出电压。
值得注意的是,高侧电阻器对补偿有影响,更准确地说是对增益有影响。如果该电阻器的值发生变化,补偿网络的增益就会发生变化,这可能会导致不稳定和不同的行为,具体取决于输出电压。除此之外,它的电阻也不容易改变,因为它是浮动的并且不接地。 更好的方法是操纵低侧电阻。它对补偿没有影响,因此转换器的行为将始终保持不变。可通过逻辑电平 FET 切换的附加电阻与固定低侧电阻 (R2) 并联。
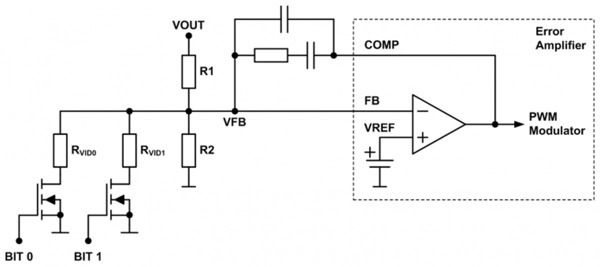
图 3 中的示例显示了具有两位的所谓 VID 接口(动态电压识别)。如果FET由微控制器的数字输出驱动,则相应的电阻器将与
固定电阻器 R2 并联切换。总电阻减小,因此输出电压增加。通过两位,可以设置四种不同的电压电平。根据需求,可以添加更多步骤。
视频接口
图3:VID接口
对于此示例,再次使用模拟方法的规范:
首先,需要选择流经高侧电阻器 R1 的电流 (I R1,min )。这里也使用 100μA。
现在,计算分压器的高侧电阻。
`R_1=(VOUT_("min")-VREF)/I_("R1,min")`
`R_1=(5.0V-0.6V)/(100μA)=44.0kΩ`
选择接近的值 44.2 kΩ。
R2 是固定低侧电阻,始终连接在误差放大器的反馈和地之间。
`R_2=(R_1VREF)/(VOUT_("min")-VREF)`
`R_2=(44.2 kΩ0.6 V)/(5.0 V-0.6 V)=6.03 kΩ`
选择接近的值 6.04 kΩ。
步骤的数量取决于VID接口的位数。例如,四位 (0、1、2、3) 启用 16 个步骤。单个步骤通过以下等式计算。
`VSTEP=(VOUT_("")-VOUT_(""))/(2^("位")-1)`
`VSTEP=(12.0V-5.0V)/(2^4-1)=467mV`
理论上,必须对每个位进行此计算,因此在本例中进行四次(BIT 0、1、2、3)。但仅对位 0 执行此操作就足够了,然后对其他三个剩余值使用 1/2、1/4 和 1/8。
`R_(2,BITx)=1/((VOUT_("min")+2^("BIT")VSTEP-VREF)/(R_1VREF)-1/R_2)`
`R_(2,BIT0)=1/((5.0V+2^0?467 mV-0.6 V)/(44.2 kΩ?0.6 V)-1/(6.04 kΩ))=55.7 kΩ`
选择接近的值 56.2 kΩ。
通过与固定电阻器 R2 并联的四个可切换电阻器,输出电压可以在 5.0V 至 12.0V 之间分 16 级设置。 可以使用数字
电位器(如图 4 所示的 TPL0401A-10)实现类似但集成度更高的解决方案。
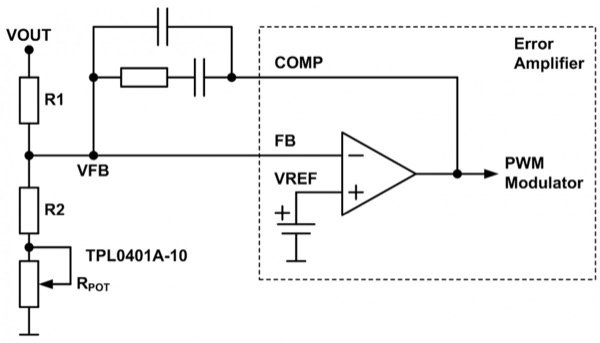
图 4:数字电位器
电位器 RPOT 与低侧电阻器 R2 串联,并由 I2C 或 SPI 控制。该特定设备有 128 个抽头,因此其功能类似于 7 位离散 VID 接口。重要的是不要将其用作反馈分压器本身,否则,高侧电阻将根据输出电压而变化,从而对补偿产生影响,如开头所述。
数模方法
第三种方法是“数字模拟”,它结合使用了所示的两种解决方案。它基于 Texas Instruments LM10011V VID 可编程电流 DAC。该器件有四个逻辑输入,其驱动方式与数字方法中描述的相同。该器件的输出不是电压,而是电流,该电流直接馈入分压器的低侧电阻器 R2,如图 5 所示。与模拟方法类似,该可编程电流的范围为 0 到59.2 A 会在低侧电阻器上产生额外的压降,从而控制电源的输出电压。 LM10011 VID 可编程电流 DAC
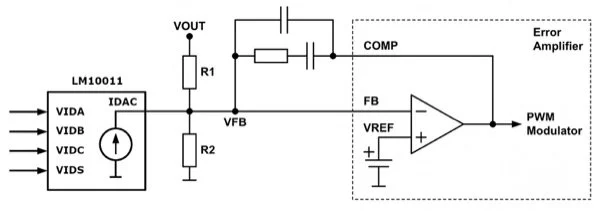
图 5:LM10011 VID 可编程电流 DAC
它可以在 4 位或 6 位模式下使用,从而提供 16 级和 64 级输出电压调节。其优点是与分立设置相比,解决方案尺寸更小,并且与 TI 的 TMS320 DSP 兼容,TMS320 DSP 可根据负载自主控制电源电压。
结论
通常,电源仅提供固定的输出电压。但在某些应用中,有必要或希望在一定范围内改变该电压。本文介绍了将此功能扩展到几乎所有电源的三种不同方法。几乎任何信号,如 PWM、简单逻辑、SPI/I2C 或专用 VID 接口都可以使用。输出电压的变化速度主要取决于转换器的带宽,较少取决于控制电路。