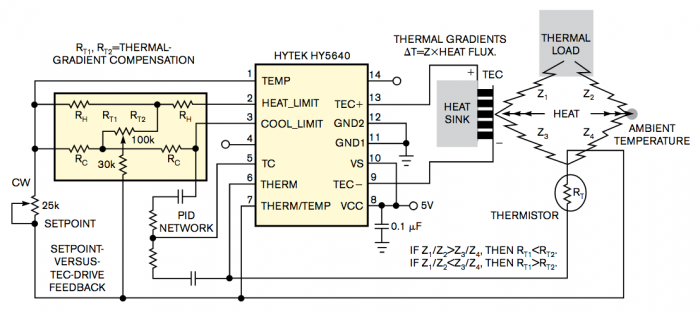
例如,如果 Z 1 /Z 2大于 Z 3 /Z 4(其中 Z 为阻抗),则环境温度升高将导致负载温度升高,而环境温度下降将使负载冷却。相反,如果 Z 1 /Z 2小于 Z 3 /Z 4,则环境温度升高将导致负载温度下降,反之亦然(图 2)。通过更紧密的热耦合和更好的绝缘来降低寄生阻抗可以减少但很少能消除误差的梯度和幅度。
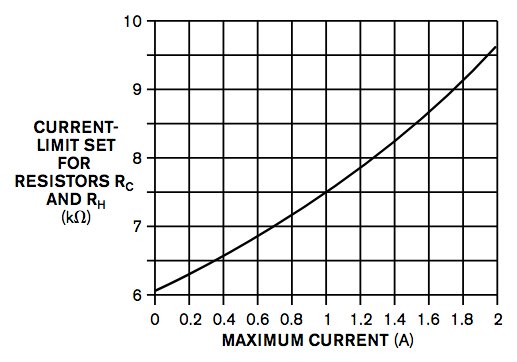
TEC 驱动热电流和冷却电流额定值图表图 2 TEC 的驱动热电流和冷却电流额定值决定了电流采样电阻器 R C和 R H的选择。
图 1 中的电路提供了一种不同的解决方案:一种电子变通方法,至少可以部分消除阻抗中的热梯度影响。它的工作原理是提供一条可调节的正反馈或负反馈路径,从 TEC 驱动级耦合环境温度的变化,从而将 TEC 驱动的变化耦合到热敏电阻设定点温度的补偿变化中。图 1 中的实现使用了一种流行的混合 TEC 控制器。跟踪 TEC 驱动的两个信号节点 COOL_LIMIT 和 HEAT_LIMIT 是可调桥式电路的输入,该电路由 R T1、R T2、电位计和相关电路组成。通过正确调整 R T1和 R T2,测试确定热敏电阻设定点必须与环境温度一起或相反移动,从而实现负载的净稳定性。免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。