发射器设计
让我们首先看一下手持控制器中的发射器电路。TX-2B 的框图如下图 1 所示。TX-2B 处理五种不同功能(前进、后退、左转、右转和涡轮)的编码。按下按钮时,代表这些功能之一的数字代码会在引脚 8 上串行输出。此数据信号的频率约为 1 kHz。
TX-2B 发送编码器芯片的内部框图
现在让我们看一下图 2 中完整发射器电路的原理图(从 TX-2B 数据表获得)。

发射机电路原理图
使用 D1 和 R5 创建一个简单的 3V 齐纳
稳压器来为 TX-2B 供电。R osc 将 TX-2B 的内部
振荡器频率设置为 128 kHz。27 MHz 载波信号由 X1、Q1 和 L1 组成的振荡器电路产生。R1 设置 Q1 的偏置电流,而 R2 提供电流限制保护。然后,TX-2B 引脚 8 上的编码数据信号通过 C1 与载波信号耦合。耦合信号如下图 3 所示。 图 3

数据信号与 27 MHz 信号耦合
然后,该信号被馈送到由 Q2 和 L2 形成的交流增益级。由于数据信号的幅度很大,因此该增益级仅在数据线为高电平时才有效。当数据线为高电平时,27 MHz 载波信号会被放大,但当数据线为低电平时,Q2 增益级会关闭。Q2 集电极上产生的波形只是由数据信号打开/关闭的放大载波信号。 这种无线电通信方法称为连续波 (CW) 无线电。CW 是简单的无线电传输类型。事实上,它是电报机用来传输摩尔斯电码的无线电通信方法。Q2 集电极上的连续波信号如下图 4 所示。

图 4
连续波信号输出至
天线 连续波信号输出至天线
CW 信号通过 C2 进行交流耦合,以消除任何剩余的直流分量。由 L3、C3 和 C4 以及 L4 组成的 π 网络用于与天线进行阻抗匹配。适当的阻抗匹配对于优化天线效率至关重要。
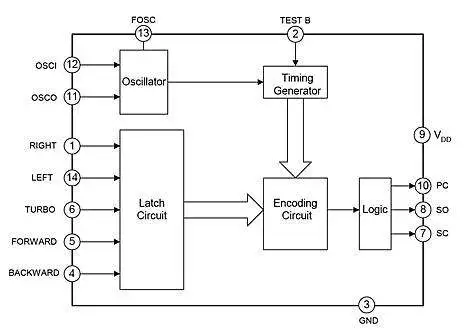
接收器设计 位于汽车内的接收器电路比发射器电路稍微复杂一些。部分原因是它还包括用于驱动两个电机(推进和转向)的 H 桥。下图 5 显示了 RX-2B 的框图。

图 5
从
放大器到天线的连续波信号输出
编码后的 1 kHz 数据信号输入到引脚 3,然后在内部放大和解码。一旦从解码信号中确定了相应的功能,就会启用相应的输出引脚,用于前进、后退、右转、左转或涡轮。接收器??电路的完整原理图(来自 RX-2B 数据表)如下图 6 所示。
图 6
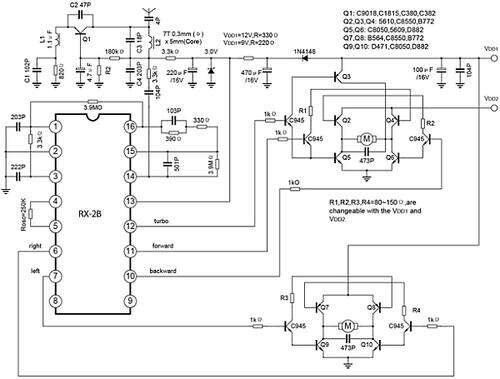
带 H 桥电机驱动器的接收器电路原理图
接收器是围绕 Q1 构建的电路。这种类型的接收器被称为再生接收器,因为它使用正反馈。由 L2 和 C3 组成的调谐 LC 电路提供正反馈,但仅在调谐频率(27 MHz)下提供。因此,这意味着只有预期信号才会被正反馈放大。这种类型的接收器的一个缺点是 L2 必须是定制
线圈,以便准确调谐接收器。
接收器电路的输出信号到达 RX-2B 上的引脚 14。此信号现在经过滤波以去除载波,并通过两个内部反相器。当信号到达 RX-2B 信号输入引脚(引脚 3)时,它已经经过了充分的滤波和清理,只剩下 1 kHz 的数据信号。与 TX-2B 一样,3V 齐纳稳压器用于为 RX-2B 供电。R osc 再次将内部振荡器频率设置为 128 kHz。
推进电机和转向电机使用两个标准 H 桥电路。H 桥允许通过切换电流流过桥和电机的方向来控制电机的方向。RX-2B 数据表中显示的电路有几个错误,已在上面显示的示意图中纠正。涡轮功能会增加通过推进电机的电流(通过 Q3),但仅在选择正向时才会发生。
天线设计
使用较低的载波频率(如 27 MHz)有几个优点。它允许使用速度较慢、成本较低的设备作为 RF 部分。其次,设计对 PCB 布局的影响不那么敏感。,对于相同的输出功率,较低频率的载波将提供比较高频率更大的范围。的缺点是较低的载波频率需要更大的天线。
无线电遥控汽车使用单极天线(而非偶极天线,如兔耳天线)。单极天线利用接地平面(这里指地球本身)的反射特性来模拟偶极天线。为了达到峰值效率,天线需要设计为在所需载波频率下产生共振。为了实现这一点,天线的长度需要为所传输无线电波波长的 1/4。波长可以使用以下公式计算:
波长 = 光速 / 频率
真空中的光速为 300 x 10 6 米/秒,但在金属中速度会慢 5% 左右。因此,假设天线波长为 1/4,载波为 27 MHz,则天线长度应为:
天线长度 = (0.95 x 0.25 x 300 x 10 6 ) / (27 x 10 6 ) = 2.6 米
但是,对于许多应用来说,2.6 米的天线长度太长,不切实际,例如小型玩具车。要么必须使用线圈天线来获得所需的长度,要么使用加载线圈使天线在较短的长度下产生共振。就我儿子的车而言,这两种技术都没有使用。相反,使用的是只有大约 15 英寸长的伸缩天线。使用太短的天线效率低下,会大大缩短范围。但对于短距离玩具来说,缩短范围是可以接受的