氮化镓场效应
晶体管 (FET) 在许多电力
电子应用中持续受到关注,但 GaN 技术仍处于其生命周期的早期阶段 [1]。虽然基本 FET 性能指标还有很大的提升空间,但更有前景的途径是开发 GaN 功率 IC。
现代硅基 GaN 器件的横向 FET 结构有利于功率和信号器件的单片集成,集成 GaN 功率 IC 已开始商业化 [2], [3]。这种集成有望减小尺寸和成本,同时提高可靠性和性能。 本文通过引入集成 FET 和栅极驱动器 IC 来举例说明其优势。该 IC 主要设计为用于间接飞行时间应用的激光驱动器,能够从 40 V 总线驱动 10 A 脉冲电流。该 IC 的输出上升和下降时间在 600 ps 以下,切换 10 A 电流时,其输出 RDS(on) 约为 50 mΩ,切换频率可超过 100 MHz。该 IC 属于可适应不同电源和逻辑系列输入的组件系列。该系列的所有现有成员都采用相同的 2×3 BGA 芯片级封装(见图 1),占位面积为 1 mm × 1.5 mm。该封装具有出色的热性能和极低的电感。

25°C 时 EPC21601 激光驱动器的主要规格。
图 1:EPC21601 全集成 GaN 电源开关的 IC 照片(a)和框图(b)。
激光驱动器要求
激光雷达的激光驱动器属于脉冲功率应用。图 2 显示了简化的激光驱动器。初,开关 Q1 处于关闭状态,C1 充电至输入电压 VIN。命令信号命令使开关 Q1 通过激光
二极管 D1 完全或部分放电 C1。电感器 L1 表示 C1D1Q1 环路的杂散电感。现代激光雷达系统需要高电流和窄脉冲以及短转换。简而言之,驱动器越快,分辨率越好;电流越大,范围越远。根据激光雷达系统,脉冲宽度范围可能为 1 ns 至 100 ns,电流范围为 1 A 至 100 A 以上。 激光驱动器的简化示意图
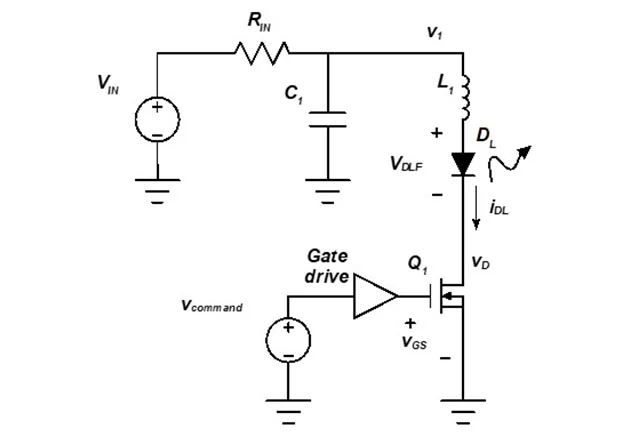
图 2:激光驱动器的简化原理图
目前,两种主要形式的激光雷达主导着激光雷达行业:直接飞行时间 (DTOF) 和间接飞行时间 (ITOF) [4]。典型的 DTOF 激光雷达发送单个脉冲并计算反射时间以计算到目标的距离。ITOF 激光雷达通过比较发射和反射脉冲序列的相位来工作。ITOF 激光雷达近显示出巨大的增长,因为它能够使用简化的接收器并因此降低成本。成像芯片是基于低成本 CMOS 相机成像技术开发出来的,该技术可让成像芯片为每个像素提供距离信息。这反过来又允许捕获整帧距离信息。这些有时被称为“闪光激光雷达”,因为它们使用激光作为闪光灯来照亮场景。虽然初的设计是用硅激光驱动器完成的,但它们的射程很短,并且由于激光脉冲弱且形状不佳,图像质量差,帧速率较低。GaN FET 已被证明在这些设计中是有效的,它可以以经济高效的方式实现更高的电流、更快的脉冲以及更清晰的边缘。
便携式激光雷达系统的典型 ITOF 规格
ITOF 激光雷达的大部分增长都处于中等范围,从不到 1 米到数十米。这些系统包括单点距离测量系统和百万像素 TOF 相机,但由于能够在一个检测周期内捕获宽视野,因此趋势偏向多点和成像系统。这种趋势有利于能够照亮整个场景的
光源,这对于垂直腔面发射激光器 (VCSEL) 来说是自然而然的选择。 单个 VCSEL 非常小,但由于它们从芯片表面发射,因此可以在单个芯片上集成许多 VCSEL 以增加光输出。对于小型便携式系统,典型的脉冲电流要求范围为 2-10 A。虽然单个 VCSEL 在低电流下的电压降很小,但等效串联电阻会在较高电流下引起相当大的电压降。VCSEL 的串联连接会进一步增加电压降。通常用于连接 VCSEL 的引线键合会由于增加的电感而产生额外的电压降。如今,VCSEL 的电压降范围为 3 V 至 30 V,许多应用需要 ≥ 10 V。在突发模式下工作时,脉冲频率范围可能从几 MHz 到 100 MHz 以上。

ITOF操作概览图。
图3:ITOF操作概览图。
由于 ITOF 成像仪使用相位差检测,波形的形状非常重要。使用矩形脉冲大大简化了相位检测,并且具有使用开关作为调制器的额外好处。这简化了激光驱动器并大大降低了总系统功率要求。总而言之,ITOF 激光雷达系统的激光驱动器应能够从高达 30V 的总线产生 2 至 10 A 的脉冲,开关频率可能≥100 MHz,脉冲宽度为 2 ns 或更小。这是一个广泛的规格范围,通常的方法是针对每个应用定制基于 GaN 的激光驱动器设计。对于基于硅的激光驱动器,这种设计空间的大部分是完全无法实现的。
整合的好处
现代 eGaN 功率 FET 具有所需的电流和电压额定值,其上升和下降时间小于 1 ns,因此可以轻松满足上述要求。事实上,单个 0.81 mm2 eGaN FET(如汽车级 EPC2203)可以满足上述整个设计空间。然而,这种 FET 的驱动要求与产生发射脉冲的数字子系统的输出不直接兼容,因为这些输出往往是 3.3 V 或更低的低压逻辑,并且具有低驱动电流能力。因此,需要一个栅极驱动器来将数字信号连接到 FET。这是一个问题,因为很少有栅极驱动器能够驱动高达 100 MHz 及以上的 eGaN FET,同时保持快速的上升和下降时间。具有所需驱动能力的少数驱动器消耗的功率水平不可接受。此外,栅极驱动器和 FET 之间的物理距离会增加栅极环路的电感,从而进一步降低性能。,栅极驱动器占用空间(比 FET 占用更多空间),增加了成本并降低了可靠性。GaN技术实现了栅极驱动器与主FET的集成,从而提高了性能,减少了零件数量,并获得了所有随之而来的好处。
表现
Efficient Power Conversion 开发了一系列单片 GaN IC 激光驱动器,如图 1 所示。主要版本的关键初步规格如表 I 所示。
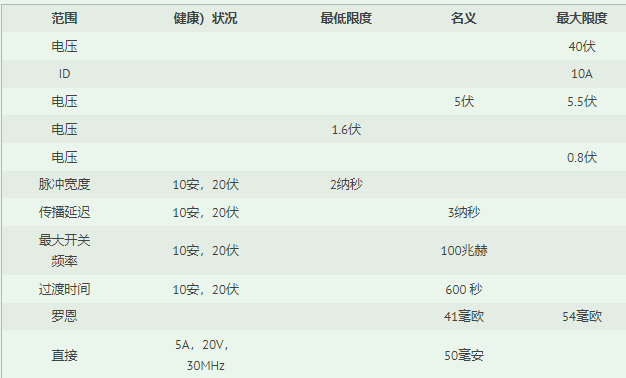
表一:EPC21601激光驱动器在25°C时的主要规格。 该 IC 系列有三种型号:(1) 2.5 V 逻辑输入,IC 电源为 5V;(2) 5 V 逻辑输入和 12 V 电源;(3) 低压差分信号 (LVDS) 输入,使其能够在嘈杂的数字环境中直接由高速数字 IC 驱动。所有三种型号均采用相同的 2×3 BGA 芯片级封装,尺寸为 1 mm × 1.5 mm,并且仅需一个旁路
电容器。

图 4 显示了一些典型的波形,它们代替激光器驱动 2 Ω 低电感负载。在电源电压为 20 V 的情况下,产生的电流脉冲幅度为 10 A。图 (4a) 显示单个脉冲。漏极电压 vdrain 下降时间 tf 测量开启时间,tr 测量关闭时间。在额定电流下,tf = 602 ps 和 tr = 306 ps。激光雷达发射器通常使用突发模式,原因之一是需要防止激光器过热。图 (4b) 显示了 10 个周期的 100 MHz 突发。IC 可以连续以 100 MHz 和 10A 运行,但突发模式操作是为了防止负载功率因过热而耗散。
单脉冲波形 (a) 和 100 MHz 突发波形 (b)。两种情况均使用 2.5 V 逻辑电平输入和 20V 电??源,负载为 2 Ω。黄色迹线为输入 (1 V/div),红色迹线为漏极电压 (5 V/div 或 2.5 A/div)
图 4:单脉冲波形 (a) 和 100 MHz 突发波形 (b)。两种情况均使用 2.5 V 逻辑电平输入和 20V 电??源,负载为 2 Ω。黄色迹线为输入 (1 V/div),红色迹线为漏极电压 (5 V/div 或 2.5 A/div)
图 5 显示了驱动垂直腔面发射激光器 (VCSEL) 的一些典型波形。图 (5a) 显示单个脉冲,图 (5b) 显示 10 个周期的 100 MHz 突发。VCSEL 封装包括一条键合线,它增加了相当大的电感,导致漏极波形振铃和较慢的光输出上升时间。请注意,由于此电感和 10 V 转换导致的较高阻抗导致开启时间(下降时间 tf)小于 300 ps。 驱动垂直腔面发射激光器 (VCSEL) 的波形。单脉冲波形 (a) 和 100 MHz 突发波形 (b)。两种情况均使用 2.5 V 逻辑电平输入和 10V 电源,并带有 VCSEL 负载。黄色迹线为输入 (1 V/div),红色迹线为漏极电压 (5 V/div),蓝色迹线为光接收器输出 (5 mV/div)。

图 5:驱动垂直腔面发射激光器 (VCSEL) 的波形。单脉冲波形 (a) 和 100 MHz 突发波形 (b)。两种情况均使用 2.5 V 逻辑电平输入和 10V 电源,并带有 VCSEL 负载。黄色迹线为输入 (1 V/div),红色迹线为漏极电压 (5 V/div),蓝色迹线为光接收器输出 (5 mV/div)。