该无线机器人汽车控制器板使用ESP32 BT/Wi-Fi模块、2 x H 桥、3.3V
稳压器构建。它还包括 ESP32 编程连接器、电源 LED、用于电源的螺钉
端子连接器、用于电机的
插头连接器以及
直流电源上用于平稳电机运行的高值
电容器。工作电源为8V至24V DC。该项目有两个 H 新娘,每个可以驱动2.5A继续。该板适用于中小型机器人小车。它是一个开源硬件项目,可以根据要求进行编程。ESP32 I/O 详细信息可在说明中找到。ESP32 支持蓝牙连接,可以使用小型手机、笔记本电脑或平板电脑控制机器人汽车。该项目是使用 ESP32-Wroom 处理器构建的,该芯片支持蓝牙和 Wi-Fi 连接。
特征
电源 8V 至 24V 直流电机负载高达 2.5A,每个电机峰值 6Amps过流关断阈值 8AmpsH 桥无散热器PWM 频率高达 20Khz(经测试),ESP32 默认输出 500Hz主板电源 LED通过锁存行为过热关断,H 桥通过锁存行为短路关断,H 桥斩波器电流限制,H 桥VDD 欠压关断4 x 3 毫米安装孔PCB 尺寸 48.90 x 41.28 毫米
连接
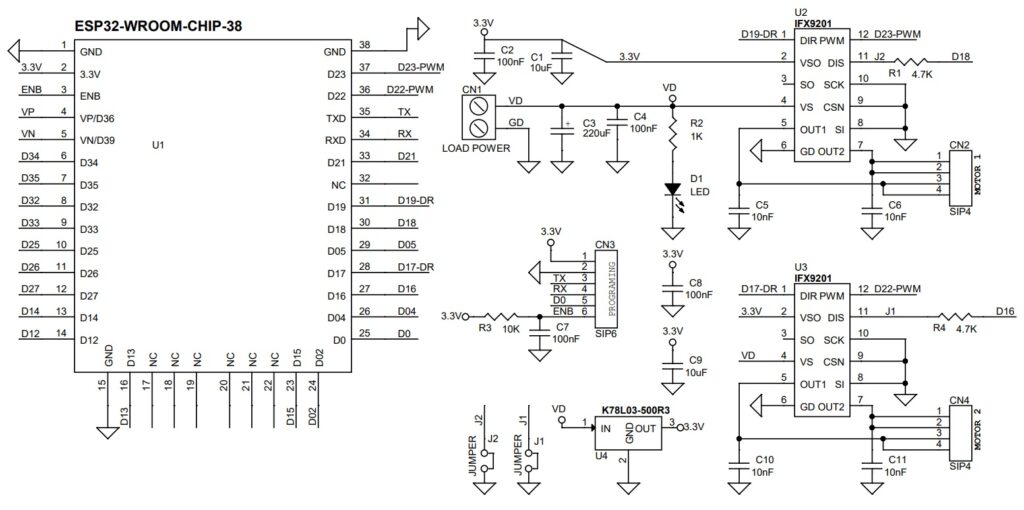
CN1:引脚 1 VDD 8V 至 24V,引脚 2 = GNDCN2:引脚 1 和 2 = 电机 1,引脚 3 和 4 = 电机 1CN3:引脚 1 = 3.3V,引脚 2 = GND,引脚 3 = TX,引脚 4 = RX,引脚 5 = GPIO0,引脚 6 = 使能(编程连接器)CN4:引脚 1 和 2 = 电机 2,引脚 3 和 4 = 电机 2J1:跳线闭合(拉低)= 启用,可使用 ESP32 引脚控制 GPIO16 引脚高 = 禁用电机 1J1:跳线闭合(拉低)= 启用,可使用 ESP32 引脚控制 GPIO18 引脚高 = 禁用电机 2D1:电源指示灯U4:3.3V 稳压器,通过电机电源 8V 至 24V 向 ESP32 处理器提供 3.3V 输入U2:H 桥电机驱动器,电机 1U3:H 桥电机驱动器,电机 2
ESP32 引脚与 H 桥 U2 和 U3 引脚 GPIO23/D23-PWM = U2 PWM,电机 1GPIO22/D22-PWM = U3 PWM,电机 2GPIO19/D19-DR = U2 方向控制高或低,电机 1GPIO17/D17-DR = U3 方向控制高或低,电机 2GPIO16/D16 = Motor2 启用/禁用(焊接跳线 J1 = 启用),脱焊跳线 J1 用于 ESP32 启用/禁用控制GPIO18/D18 = Motor1 启用/禁用(焊接跳线 J2 = 启用),脱焊跳线 J1 用于 ESP32 启用/禁用控制