无人机相比较卫星和载人航空飞机遥感平台而言,具有成本低、灵活性高的特点。为了满足科学遥感实验、完成遥感作业任务、协调无人机电子吊舱中多组件工作、控制遥感影像传感器姿态,系统以AT89S52为主控芯片,扩展多路串口及USB接口以实现系统与外围设备的通信,同时设计了相机驱动模块及三自由度步进电机驱动模块。通过无人机航空遥感实验证明该系统能够满足遥感实验要求。
USB接口扩展电路设计
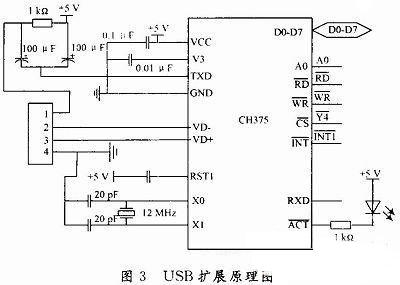
USB口扩展由CH375芯片实现。CH375是南京沁恒有限公司生产的USB总线的通用接口芯片。它的主要特点是价格便宜、接口方便、可靠性高。支持 USB-HOST主机方式和USB-DEVICE/SLAVE设备方式。CH375的USB主机方式支持常用的USB全速设备,外部单片机需要编写固件程序按照相应的USB协议与USB设备通信。但是对于常用的USB存储设备,CH375的内置固件可以自动处理Mass-Storage海量存储设备的专用通信协议,通常情况下,外部单片机不需要编写固件程序。就可以直接读写USB存储设备中的数据。CH375和单片机的通信有2种方式:并行方式和串行方式。USB扩展电路原理图如图3所示,CH375芯片设置为内置固件模式,使用12 MHz晶体。单片机P0口与CH375的D0~D7相连作为数据总线,译码器输出Y4与CH375的CS相连片选该芯片,单片机A0与CH375的A0相连,可选择CH375的地址或是数据输入与输出。当A0为高电平是D0~D7的传输的是地址,低电平时传输的是数据。P3.6和P3.7分别控制CH375的读写操作。CH375的INT接单片机的INT1输入端,当有数据通过USB口输入时产生中断信号,通知单片机进行数据处理。当CH375芯片初始化后并成功与主机连通之后,指示灯亮。
步进电机驱动电路
稳定云台控制即为三自由度步进电机控制,即控制遥感传感器的俯仰角、横滚角和航向角使稳定云台保持水平(或垂直)状态。步进电机驱动由THB6128芯片实现,单片机只需输出步进电机运行方向和脉冲信号即可达到控制步进电机的目的。
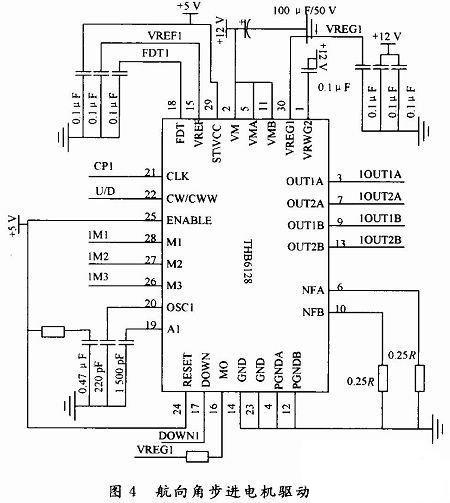
THB6128是高细分两相混合式步进电机驱动专用芯片,通过单片机输出控制信号,即可设计出高性能、多细分的驱动电路。其特点为双全桥MOSFET驱动,低导通电阻Ron=0.55 Ω,耐压36 V,大电流2.2 A(峰值),多种细分可选,可达128细分,具有自动半流锁定功能,快衰、慢衰、混合式衰减3种衰减方式可选,内置温度保护及过流保护。图4为航向角步进电机驱动电路,俯仰角、横滚角步进电机驱动与之相同。图中CP1与U/D分别为单片机给出的驱动脉冲与电机运行方向控制信号。M1,M2,M3为电机驱动细分数选择信号输入,由拨码开关人为控制。FDT1与VREG1分别为衰减模式选择电压与电流控制电压输入端。当3.5 V时为慢衰减模式;当为混合衰减模式;当FDT1《0.8 V时为快衰减模式。调整VREG1端电压即可设定步进电机驱动电流值。
CCD/相机驱动电路设计
CCD/相机驱动由单稳态触发器74LS221和光耦合器P521实现。74LS221既可以下降沿触发也可上升沿触发,且都可以禁止输出。其输出的脉宽通过内部补偿获得而不受外部电压和稳定影响,在大多数应用中,脉宽只由外接的时控元件决定。CCD/相机驱动电路如图5所示。图示参数的单稳态触发器高电平持续时间约为33 ms,可根据相机的实际曝光时间的需要,改变电路的充电时间常数RC来调节稳态时间的长短。图中Camera为单片机P3.5口,当其为下降沿时,触发单稳态触发器输出高电平,此高电平作用于光耦合器P521的二极管端,从而触发三极管端导通,进而触发相机快门。P521的输出端串接一个10kΩ的电阻,防止导通时电流过大而损坏相机。

数据存储模块由AT24C512实现,单片机P3.0,P3.1口分别与AT24C512的SCL、SDL端口相连,并接入上拉电阻,模拟I2C总线扩展64KB E2PROM数据存储器。SRAM扩展由IDT6116SA芯片实现,扩展2 KB用于缓存单片机计算过程中的临时数据。系统输入电压为12 V直流电,电源模块采用7805与7805两片三端稳压器串接,降低单片稳压器两端的压降,获得平稳的+5 V电压。
通过实验证明本系统可以较好的满足无人机航空遥感平台机载作业控制的要求,可以协调电子吊舱的各个组件工作,控制相机的姿态,实时下传机载作业数据,使用的I/O口较少,USB接口的扩展解决了当前许多笔记本电脑不具备COM口的问题,在野外实验时亦可及时的处理作业系统中的照片信息数据。单片机仍还有较多的资源可以利用,可方便系统的升级,但同时也受到微处理器数据处理能力的限制。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。