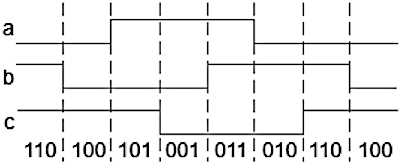
有感检测主要基于霍尔传感器,在无刷电机中,一般会使用 3 个开关型霍尔传感器来检测转子位置。这些传感器会以相隔 120° 的方式进行安装,如图所示。

当转子的 N 极靠近霍尔传感器时,传感器输出高电平;当 N 极远离时,输出低电平。当转子转动一圈,会产生特定的波形。
无感控制策略有多种,包括反电动势法、电感法、续流二极管法等,其中反电动势法应用为广泛和成熟。根据楞次定律,反电动势的极性与绕组上主电压的极性相反,其计算公式如下:

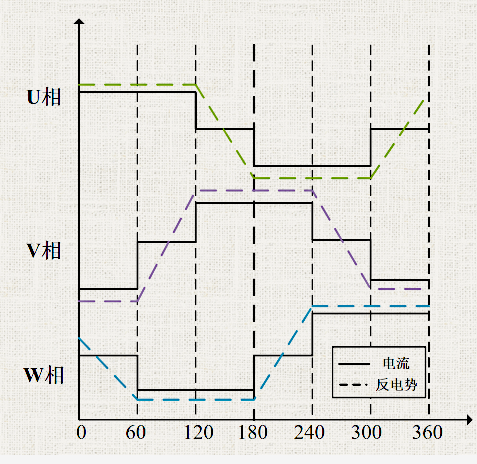
无刷电机制作完成后,转子磁场和绕组匝数等参数固定,反电动势取决于角速度,即转子的转速。每次换向时,有一个绕组为正,一个为负,第三个保持开路。通过检测各相绕组的反电动势过零点,能在一个电周期内获得转子的 6 个位置。三相无刷电机旋转一个周期时,各相的电流与反电动势波形如下:
当无刷电机转速极慢时,反电动势幅度值很低,很难检测到过零点。
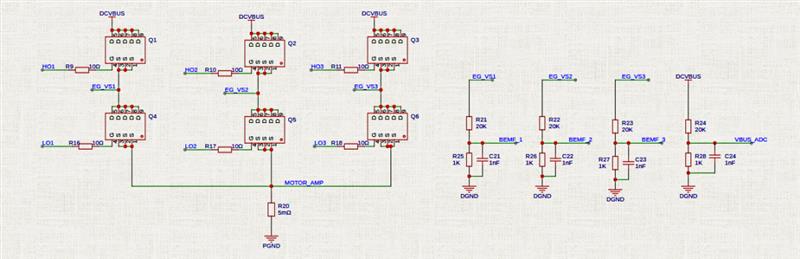
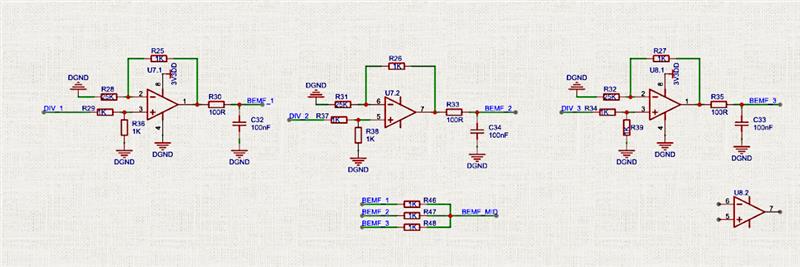
下面是一个 ADC 过零点检测电路的硬件原理图,通常为简化计算流程,端电压与直流母线电压会采用相同的分压系数。例如在 12V 无刷电机控制方案中,可采用 1:21 的分压方案,使直流母线电压与端电压处于电机控制芯片 ADC 能够采集的范围。
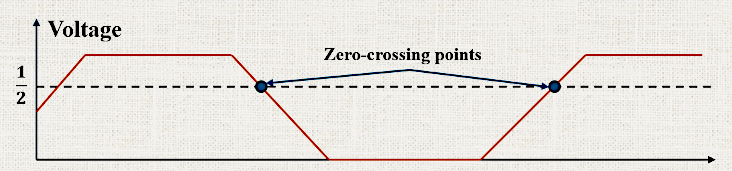
无刷电机转动时,反电动势过零点会出现浮空相。此时,检测各相的对地电压并与中性点电压比较。当端电压从大于中性点电压变为小于中性点电压,或者从小于变为大于时,可视为过零点。但通常无刷电机不会引出中性点,无法直接测量其电压。
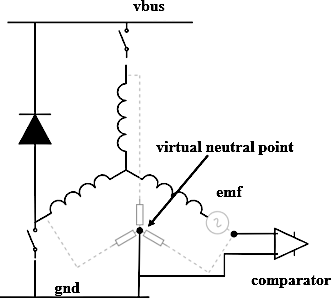
在基于比较器的过零点检测方案中,可以将三相绕组通过相同阻值的电阻器连接到公共点,构建一个中性点,再将该中性点电压与端电压通过比较器进行比较,从而获得过零点的信号。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。