基于 SiC 器件的电机驱动
工业电机驱动器涵盖广泛的应用,从低压工业驱动器(例如风扇、泵和传送带、热泵和空调)以及伺服驱动器。据估计,这些通常由交流电源驱动的电动机占工业用电量的 70-80%。因此,人们有强烈的动机来提高这些驱动器的效率。即使该参数的微小改进也能在节省能源和成本方面产生深远的影响。国际电化学委员会 (IEC) 为电机和集成电机驱动器制定了各种效率标准。例如,现在主要国家都要求采用IE3标准。在欧盟,额定输出功率在 75 kW 至 200 kW 之间的电机需要符合 IE4 标准。
传统电机驱动系统基于硅 (Si) 器件,例如 IGBT。 SiC 的许多材料优势直接转化为更低的功率损耗,从而提高效率。这一优势随着开关频率的增加而增加,预计在 16 kHz 开关频率下的 25kW 应用中,基于 1200 V SiC MOSFET 的逆变器比 IGBT 提高了 2.2%。更高的频率允许使用更小的无源器件。其他好处包括减少可听噪音、提高电机转速以及提高控制精度。需要功率因数校正 (PFC) 级的电机可以进一步受益于 SiC 器件的使用,例如用于升压级的肖特基二极管,以及更简单的拓扑,例如使用 SiC MOSFET 的无桥图腾柱。使用 SiC 可以简化冷却要求并减小整体系统尺寸。虽然 SiC 可实现更快的转换速率 (dv/dt),但由于寄生效应产生的过冲,可能会对电机轴承造成损害。然而,SiC MOSFET dv/dt 可以通过栅极电阻 RG 轻松控制,并且即使在较慢的 dv/dt 下,其效率也可以显着优于 Si IGBT。
因此,该套件适用于 230 V 交流电源下额定功率为 15 kW 或更低的电机,或者使用 400/480 V 交流电源时额定功率为 30 kW 的电机。
该套件包括:
承载功率 MOSFET 子卡和相关栅极驱动器板以及控制器板的主板。三相主板利用了从早期半桥主板每个相中获得的知识。这包括限度地减少电源和栅极环路中的寄生电感。边缘卡配置连接子板。直流总线沿电路板的长度分布,并采用交错连接,以限度地减少电感。其中包括对关键参数的监控,例如每相和直流母线的电流传感器、漏极电压和相电压感测。使用差分运算放大器相对于直流总线测量每相电压。该信号被按比例缩小,然后用于馈送控制器。栅极驱动器可以使用主板上的漏极电压传感器来监控 MOSFET 的漏极-源极 (VDS) 电压,以进行短路检测。控制电源需要单个 12 V 电源。 CAN 接口(或 USB)允许与计算机和图形用户界面 (GUI) 进行外部通信。该板还包括用于闭环电机控制的旋转变压器和编码器接口。
每相需要 3 个栅极驱动器卡。该套件与 Analog Devices、Skyworks 和 Texas Instruments 等合作伙伴公司的隔离式 2 通道栅极驱动器卡兼容。这些卡已经过兼容性和驱动 Wolfspeed 的 SiC MOSFET 的能力测试。需要注意的是,并非所有这些卡都支持短路测试或具有米勒钳位,这可能是选择驱动卡时需要考虑的因素。
功率MOSFET子卡可选用Wo lfspeed的SiC MOSFET,额定电压为650 V至1200 V,具有多种导通电阻(RDSON),封装类型包括通孔和表面贴装。目前,该套件有超过 20 个子卡可供使用,并且随着时间的推移还会添加更多子卡。这些子卡包括一个预组装的散热器,与主板上的风扇对齐以实现高功率测试。可以快速更换子卡,以根据应用需求执行比较测试和 MOSFET 选择。该平台支持标准 B6 逆变器拓扑,每个开关位置有一个设备。
控制卡:NXP 制造的高压控制卡,可与该套件一起使用。这些卡充当开发三相 PMSM、BLDC 和 ACIM 控制和功率因数解决方案的平台。该平台与恩智浦的微控制器 (MCU) 和数字信号控制器 (DSC) 兼容。这些范围从 48 MHz MCU 到能够以数百 MHz 运行的控制器。 MCU 基于 ARM Cortex。先进的i.MX RT 系列 MCU 具有实时控制功能,其中包括用于组合电机和运动控制的多核选项。 DSC 可以提供低延迟和先进的计算能力。这些控制器包括支持闭环电机控制所需的所有外设,例如运算放大器、正交解码器、ADC、PWM 引擎等。固件开发是 NXP 提供的一项关键支持功能,详细信息如下。
可选的降压-升压滤波器板可以连接到主板的中间相,以将系统作为降压或升压转换器运行。该套件还可借助可选的空芯电感器用于 MOSFET 的双脉冲测试 (DPT) 表征。对于 DPT 测试,可以选择用于 I DS测量的电源子卡上的分流电阻器来进行开关能量测量(较高值)与功率测试(较低值)。
开发流程
让我们看看用户使用此套件进行三相电机驱动开发时可以采取的一些步骤:
MOSFET 表征初可以通过 DPT 测试来完成。这可以帮助确定初始 R G和 dv/dt,并测量开关损耗和过冲。接下来,可以调整栅极驱动和 R G 、优化死区时间、执行短路测试并检查波形,以确保栅极和漏极电压位于安全工作区 (SOA) 内。
随后可以在应用负载点执行高功率测试。这会测试栅极驱动器、MOSFET 和系统控制参数。系统优化将涉及调整开关频率、死区时间和环路控制参数。 NXP 的 FreeMASTER 调试和数据可视化工具有一个名为电机控制应用调整工具 (MCAT) 的插件模块。这样可以实时监控、调整和更新电机控制参数。该工具生成的电机识别可用作调整的起点。或者,将外部电机模型(例如 Simulink)的数据到 MCAT 工具上。 MCAT 内的全套实时控制嵌入式软件库 (RTCEL),例如数学、PI 和 PID 控制查找表和控制算法的通用功能、支持磁场定向控制 (FOC) 的电机控制调制、数字滤波器库等都是其中的一部分。 RTCEL 还包括用于无传感器控制的电机控制库 (AMCLIB)。 MCAT 工具独立于 MCU。如图 2 所示,MCAT 的输出是一个头文件,可以合并到终软件中。
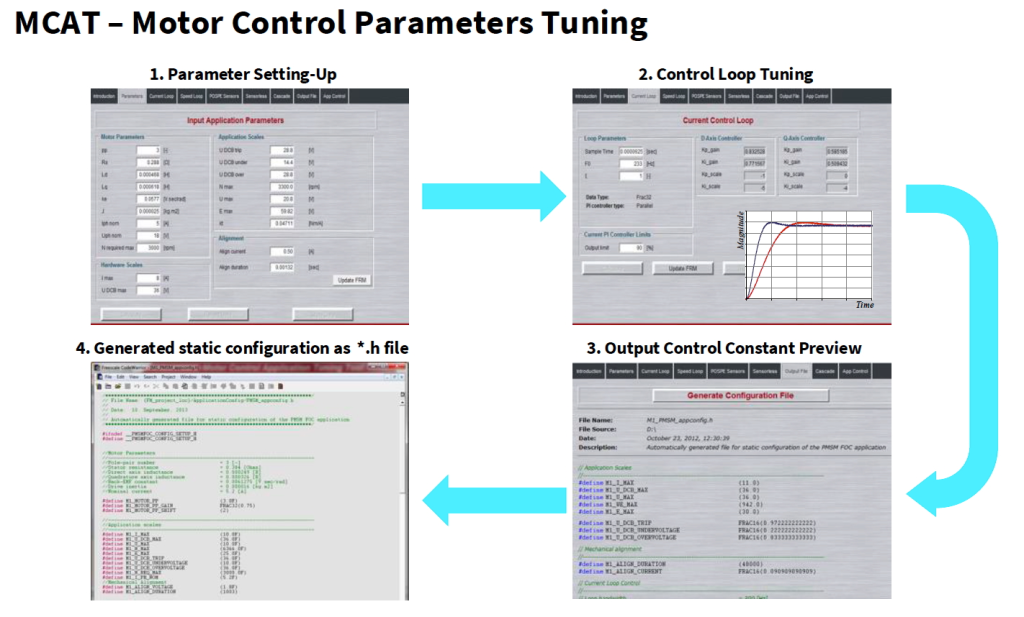
图 2:Wolfspeed 三相电机控制 SpeedVal 套件中使用的恩智浦 MCAT 电机调谐流程(来源:Wolfspeed)
开关优化之后可以进行全面的性能验证,测试所选硬件和使用的参数的效率和稳健性。图 3 显示了执行逆变器测试时 GUI 输出的示例。该接口允许开箱即用的测试,无需编程。
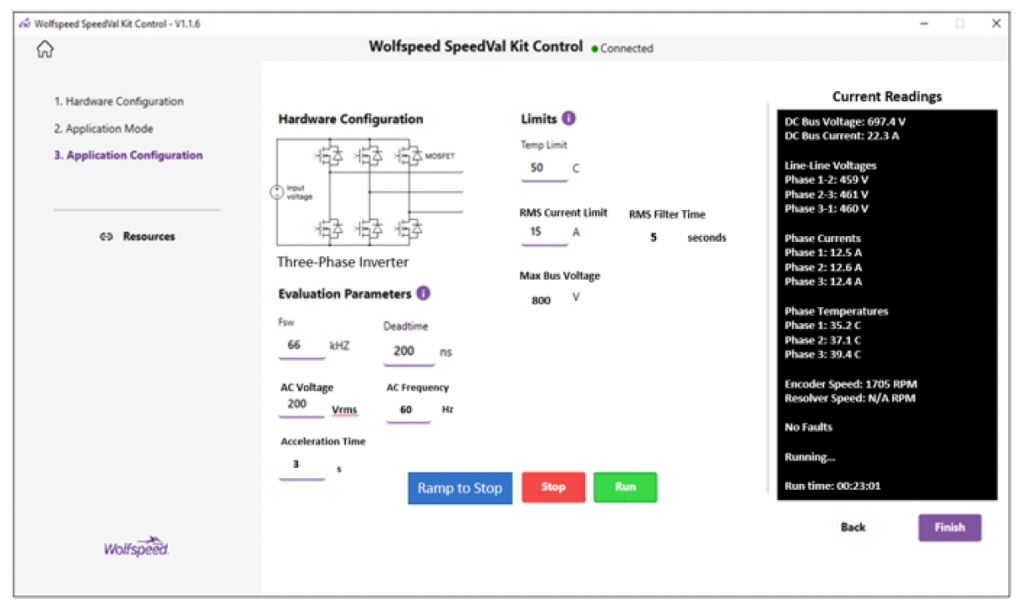
图 3:运行逆变器测试时的 SpeedVal 套件 GUI 输出(来源:Wolfspeed