平方律调制器如何利用
电子元件的二阶非线性来生成 AM 波。理论上,这种类型的调制器电路可以产生传统的 AM 信号和双边带抑制载波 (DSB-SC) 信号。然而,只有当非线性元件的输入输出特性中的线性项和二阶项均非零时,它才能产生 DSB-SC 信号。
实际上,情况通常并非如此。此外,实际非线性元件的三次非线性会在平方律调制器的输出处产生不需要的信号分量。即使在生成传统 AM 信号时也是如此。
在本文中,我们将讨论如何通过在平衡配置中使用两个平方律器件来解决这些问题。这种布置称为平衡调制器,可以生成DSB-SC和传统 AM信号。然而,在我们深入研究之前,让我们更详细地回顾一下平方律调制器及其局限性。
平方律调制器的局限性
图 1 中的平方律调制器通过将消息信号m ( t ) 和载波c ( t ) 之和发送到非线性设备(后接适当调谐的带通滤波器)来产生 AM 波。
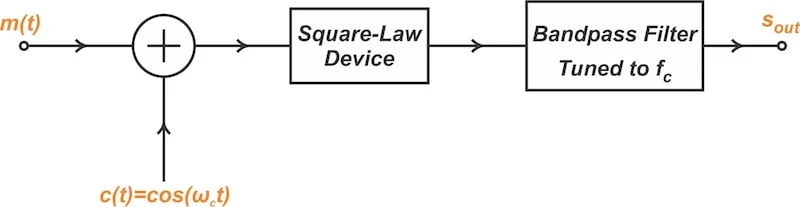
平方律调制器的框图
图 1.平方律调制器的框图。
在上一篇文章中,我们假设图1中平方律器件的输入输出特性由下式表示:
$$y(t) ~\大约~ \alpha_1 x(t) ~+~ \alpha_2 x^2(t)$$
等式 1。
在这种情况下,输出端的传统 AM 信号由下式给出:
$$s_{out} ~=~ \alpha_1 \Big ( 1 + 2 \frac{ \alpha_2}{\alpha_1} m(t) \Big ) \cos( \omega_c t)$$
等式2。
其中调制指数为:
$$\mu~=~2 \frac{ \alpha_2}{\alpha_1}$$
等式 3。
除非等式 1 中的 α 1 = 0,否则平方律调制器无法生成 DSB-SC 信号。正如前面提到的,这在实践中不会发生。
等式1的另一个限制是它仅包括α 1和α 2。同时,实际的非线性设备在其幂级数展开式中通常包含二阶以上的非线性项。这些高阶项可能会在调制器的输出处生成不需要的分量。
为了理解这一点,假设非线性设备的输入输出特性可以表示为:
$$y(t) ~\大约~ \alpha_1 x(t) ~+~ \alpha_2 x^2(t) ~+~ \alpha_3 x^3(t)$$
等式 4。
公式 5 显示了如果我们将 ( m ( t ) + cos(? c t )) 传递给公式 4 中的三次项,则输出中出现的分量:
$$\begin{聚集*}\alpha_3 \big ( m(t) ~+~ \cos(\omega_c t) \big ) ^3 ~=~ \\\alpha_3 m^3(t) ~+~ 3 \ alpha_3 m^2(t) \cos (\omega_c t)~+~3 \alpha_3 m(t) \cos^2(\omega_c t)~+~\alpha_3 \cos^3( \omega_c t)\end{聚集*}$$
等式 5。
我们可以将该方程的结果分解如下:
项 \(\alpha_3m^3(t)\) 生成以f = 0 为中心的频谱分量。
第二项 \(3 \alpha_3m^3(t) \cos(\omega_ct)\) 以f = f c为中心。
第三项 \(3 \alpha_3m^3(t) \cos^2 (\omega_ct)\) 产生直流分量以及二次谐波 (2 f c ) 周围的分量。
第四项 \(\alpha_3 \cos^3 (\omega_ct)\) 产生基波 ( f c ) 和三次 (3 f c ) 谐波分量。
让我们使用公式 6 中的三角恒等式来仔细研究第四项。
$$\cos^3 (x) ~=~ \frac{1}{4} \cos(3x) ~+~ \frac{3}{4} \cos(x)$$
等式 6。
由于非线性器件后面是调谐到f c 的带通滤波器,因此该三次项在载波频率周围产生以下附加分量:
$$3 \alpha_3 m^2(t) \cos( \omega_c t) ~+~ \frac{3}{4} \alpha_3 \cos( \omega_c t)$$
等式 7。
等式 7 的项将频率转换为f c 的消息信号的平方与所需的 AM 波相加。由于该分量会干扰 AM 波,因此需要一种非线性器件,其高阶系数(? n ,当n ≥ 3 时)与 ? 2相比可以忽略不计。否则,我们需要限制输入信号的幅度以保持高阶非线性项相对较小。
使用平衡调制器是另一种选择。在下一节中,我们将介绍平衡调制器的基本原理,并解释它如何生成 DSB-SC 信号。我们将在本文后面回过头来讨论它如何处理上述不需要的信号分量。
使用平衡调制器产生 DSB-SC 信号
图 2 显示了平衡调制器的框图。
平衡调制器的框图。
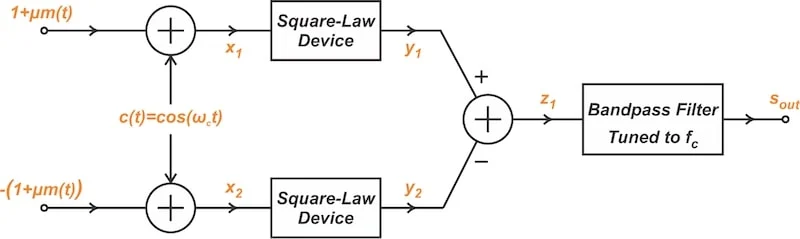
图 2.平衡调制器的框图。
正如您所看到的,平衡调制器包含两个相同的平方律调制器,一个用于平衡调制器的两个信号路径。一条路径接收消息信号m ( t );另一条路径输入消息信号的反转形式 – m ( t )。来自非线性器件的输出信号相互相减,然后所得信号通过带通滤波器。
为了了解平衡配置如何在 ? 1 ≠ 0 的情况下产生 DSB-SC 信号,我们现在先将器件的三次非线性放在一边。因此,非线性元件的输入输出特性可以描述为:
$$y(t) ~\大约~ \alpha_1 x(t) ~+~ \alpha_2 x^2(t)$$
方程 8.
图 2 左侧两个加法器输出端的信号为:
$$x_1 ~=~ m(t) ~+~ \cos( \omega_c t) \quad \text{和} \quad x_2 ~=~ -m(t)~+~\cos( \omega_c t)$$
方程 9.
结合方程 8 和方程 9,上部非线性器件输出处的??信号为:
$$y_1(t) ~\approx~ \alpha_1 m(t) ~+~ \alpha_2 m^2(t) ~+~ \alpha_2 \cos^2( \omega_c t) ~+~ \Big ( \alpha_1 ~ +~ 2 \alpha_2 m(t) \Big ) \cos( \omega_c t)$$
方程 10。
将上式中的m ( t )替换为 – m ( t ) 即可得到下部非线性器件输出处的??信号:
$$y_2(t) ~\approx~ -\alpha_1 m(t) ~+~ \alpha_2 m^2(t) ~+~ \alpha_2 \cos^2( \omega_c t) ~+~ \Big ( \alpha_1 ~-~ 2 \alpha_2 m(t) \Big ) \cos( \omega_c t)$$
公式 11。
从y 1 ( t )中减去y 2 ( t ) ,我们得到信号z 1 ( t ):
$$z_1(t) ~=~ y_1(t) ~-~ y_2(t)~=~ 2\alpha_1 m(t) ~+~ 4 \alpha_2 m(t) \cos( \omega_c t)$$
公式 12。
在上式中,项是基带信号。第二项是所需的 DSB-SC 信号,其以f c为中心。带通滤波器调谐至f c并仅允许 AM 信号通过至输出,产生以下等式:
$$s_{out}(t) ~=~ 4 \alpha_2 m(t) \cos( \omega_c t)$$
公式 13。
这是 DSB-SC 信号,因此应用于输入的载波不会出现在一个加法器的输出中。相反,该电路对于输入c ( t ) = cos(c t )) 而言就像一个平衡电桥。电路的另一个输入m ( t ) 出现在节点z 1处(公式 12)。
由于它仅相对于其输入之一保持平衡,因此我们将该电路称为单平衡调制器。在双平衡调制器中,两个输入都被抵消。输出端仅提供消息信号和载波的乘积。
高阶非线性项对平衡调制器的影响
接下来,让我们看看当非线性设备的幂级数展开式中包含三次项时会发生什么。三次项在节点y 1处生成以下不需要的信号分量:
$$3 \alpha_3 m^2(t) \cos( \omega_c t) ~+~ \frac{3}{4} \alpha_3 \cos( \omega_c t)$$
公式 14。
为了找到下层路径产生的不需要的信号分量,我们应该将上式中的m ( t ) 替换为 – m ( t ) 。然而,很明显,反转消息信号不会影响不需要的项。相反,因为不需要的项同时出现在节点y 1和y 2处,所以它们在减法时在输出处抵消。
请注意,平衡调制器中的两个非线性器件应表现出大致相同的特性。否则他们将无法消除不需要的信号分量。
使用平衡调制器生成传统 AM 信号
到目前为止,我们只讨论了 DSB-SC 信号的平衡调制器。但传统增材制造又如何呢?
公式 15 重现了生成传统 AM 信号的基本公式:
$$s_{out}(t) ~=~ A_c \Big ( 1~+~ \mu m(t) \Big ) \cos(\omega_c t)$$
公式 15。
为了使这个方程适用于平衡调制器,我们注意到以下几点:
平衡调制器有效地充当乘法器。
我们对平衡调制器的分析对输入消息信号没有限制。
鉴于上述情况,我们可以理想地将具有任意调制指数的1 + μ m ( t ) 应用于平衡调制器以产生传统的 AM 信号。如图 3 所示。
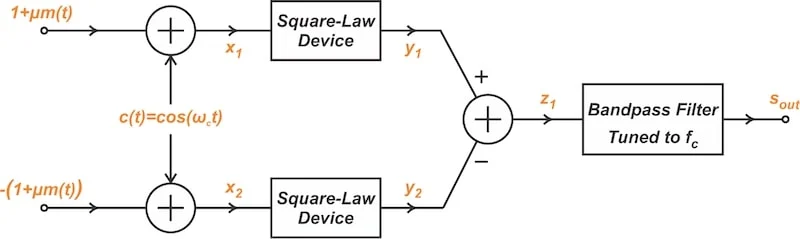
使用平衡调制器生成传统的 AM 信号。
图 3.使用平衡调制器生成传统 AM 信号。
将公式 13 中的m ( t )代入 1 + μ m ( t ) ,上述电路的输出为:
$$s_{out}(t) ~=~ 4 \alpha_2 \big ( 1~+~ \mu m(t) \big ) \cos( \omega_c t)$$
公式 16。
这是传统的 AM 波。
当使用平衡调制器创建传统的 AM 信号时,请务必记住,实际的非线性元件可能会针对特定范围的输入值表现出平方律特性。例如,仅当输入为正时,非线性组件的输出可能与输入的平方成正比。
如果是这种情况,我们需要将非线性元件的输入限制在设备表现出预期平方律响应的范围内。这限制了我们在使用图 3 中的技术时可以实现的调制指数。但是,我们可以根据需要增加调制指数,方法是将输入信号限制在允许的范围内,然后从sout中减去适当缩放的载波版本(t ) 在调制器的输出端。
实用的平衡调制器电路
让我们通过简要检查示例电路实现来结束我们的讨论(图 4)。
平衡调制器的示例电路实现
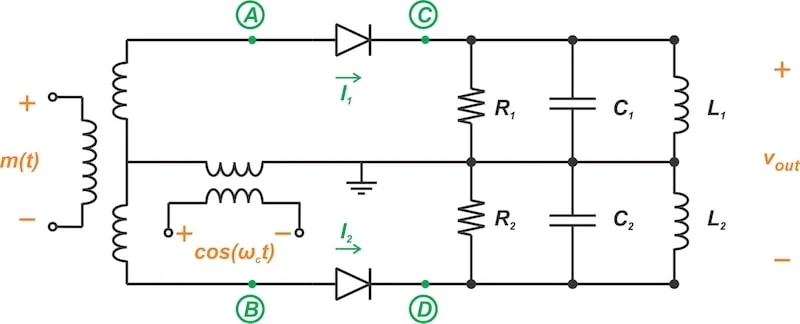
图 4.平衡调制器的示例电路实现。
该电路使用
变压器将载波与消息信号结合起来。所需的带通滤波器采用 LC 谐振回路的形式,调谐到调制器输出的载波频率。为了引入所需的非线性,使用了
二极管。
图 4 中流经二极管的电流与其两端的电压呈现非线性关系。为了理解这一点,我们假设节点 C 处的电压远小于节点 A 处的电压。如果是这种情况,我们可以通过节点 A 处的电压 ( v A ) 来近似二极管两端的电压。然后可以使用幂级数来描述流过二极管的电流 ( I 1 ):
$$I_1 ~=~ \alpha_1 v_A ~+~ \alpha_2 (v_A)^2 ~+~ \alpha_3 (v_A)^3$$
公式 17。