典型的有刷直流电机是一种非常方便但噪音很大的设备。电刷实现极性反转,也称为“换向”,这样您只需施加恒定的直流电压即可使电机转动。但与这些电刷相关的突然连接和断开会导致瞬态干扰,从而影响连接到电机的电路(通过标准传导路径)以及附近的组件(通过 EMI)。
显而易见的解决方案是消除电刷,这种方法导致了无刷直流电机。问题是:如何在没有提供持续极性反转的电刷的情况下使电机转动?
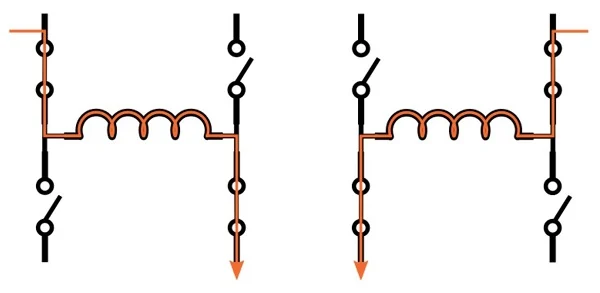
总体思路是使用电子设备而不是机械设备进行换向。如您所知,电机通常由全桥电路驱动。它们由四个晶体管组成,这些晶体管的排列使得直流电压源提供的电流可以沿任一方向驱动通过负载。因此,即使驱动电路的电源始终为正,我们也可以反转电机磁场的极性:
这里的困难在于您需要知道何时反转极性。有刷直流电机内部会自动进行同步,但如果我们使用电子设备而不是电刷,则需要某种有关转子位置的反馈。获得这种反馈的一种方法是通过霍尔效应
传感器。
控制器+桥+霍尔
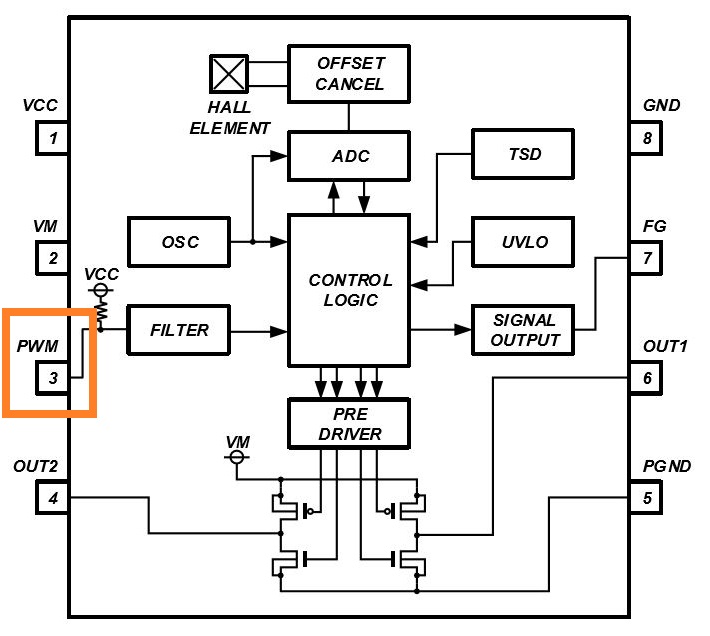
ROHM 的BU69090NUX (我们称之为 6909)被描述为用于笔记本电脑冷却风扇的单相电机驱动器,尽管一些有创造力的读者肯定可以找到其他(也许不太平凡)的应用。
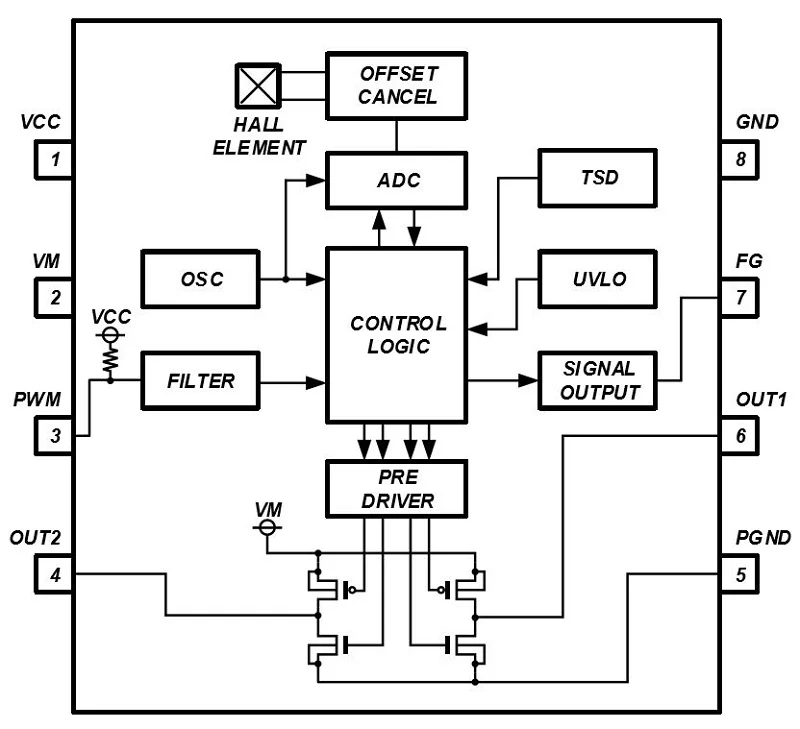
该图取自BU69090NUX数据表。
霍尔元件实际上位于 IC 封装内部。因此,您无法使用 6909 驱动房间另一侧的电机。当我浏览数据表时,我没有看到任何有关 IC 和电机之间必要的物理关系的具体信息。
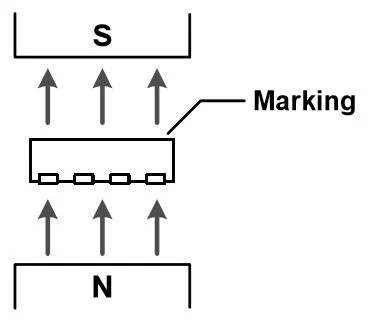
数据表确实提供了这个磁极性方向图,但我不知道如何处理它。如果您有任何想法,或者您对我的无知感到震惊,请随时向下滚动并发表评论。
6909 是一款单相器件,因为它有一个全桥用于驱动一个电机绕组。这与三相无刷直流电机形成鲜明对比,三相无刷直流电机具有三个绕组,因此需要由精心设计的换向方案控制的三个驱动电路。
霍尔信号
完成无刷直流电机控制不仅仅需要霍尔元件。您可以在框图中看到霍尔信号通过偏移消除块,然后被数字化。图中未明确显示的另一个功能是自动增益控制(AGC)。
我的理解是,反馈信号的幅度会根据电机的特性以及电机与芯片之间的距离而变化,也许会很大。 AGC 通过确保 6909 能够自动补偿这些不可预测的变化,使 6909 变得更加通用和用户友好。这个相当复杂的图表直观地传达了 AGC 功能:
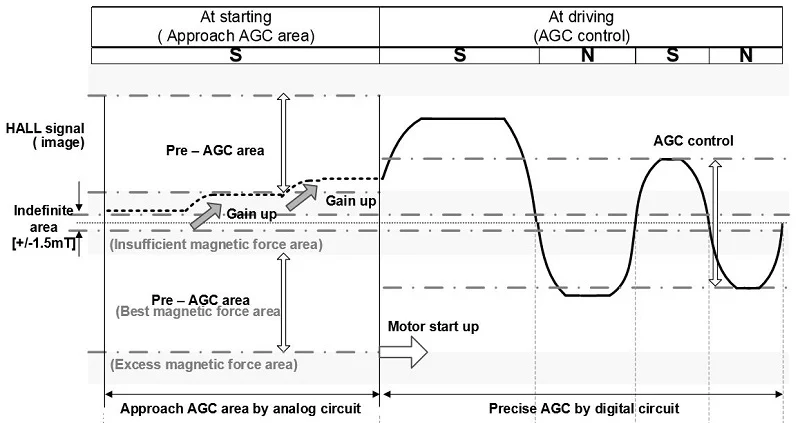
该图取自BU69090NUX数据表。
速度控制
调整电机速度在许多应用中至关重要,因此 6909 也包含此功能也就不足为奇了。直流电机通常由固定电压源驱动,因此我们无法通过改变实际驱动电压来控制转速。相反,我们通过脉宽调制驱动电路的输出来改变传递到绕组的平均电压。
6909 的速度控制是通过 PWM 输入引脚实现的,该引脚(间接)控制电机驱动信号的 PWM 占空比。
该图取自BU69090NUX数据表。
输出信号的 PWM 特性比输入信号的 PWM 特性更为复杂。下图非常详细地说明了 6909 的实际工作原理:
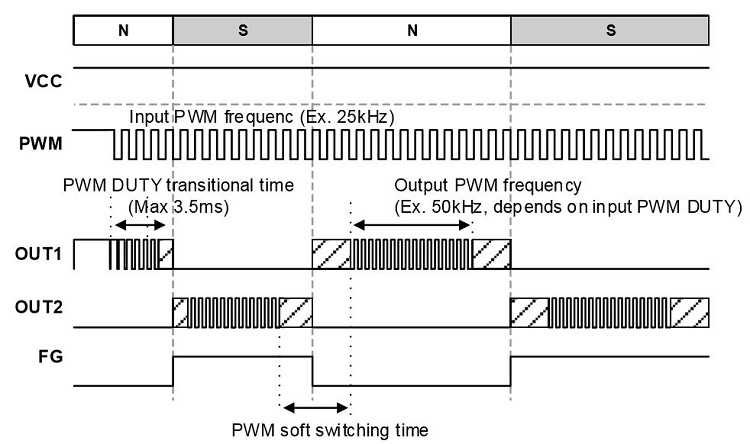
该图取自BU69090NUX数据表。
OUT1/OUT2 电机驱动信号的极性随着检测到的磁极性的变化而反转。
FG 输出信号可用于通知另一个组件有关电机状态的信息。
输入 PWM 控制输出 PWM,但频率不相同,并且输出 PWM 在转换事件之前和之后发生变化(这称为“软
开关”功能)。