本文概述了电机控制设计注意事项,例如多电机控制、磁场定向控制、功率因数校正和无
传感器控制。它还解决了当今的
微控制器 (
MCU) 如何为各种应用带来更高的精度、功效和更低的成本。
数字电机控制的首次引入是为了克服传统模拟系统在处理漂移、组件老化和温度引起的变化方面所面临的挑战。灵活的软件算法不仅消除了与组件相关的容差问题,还使开发人员能够动态适应环境条件随时间的变化。例如,通过数字实现,现在可以根据系统温度调整
风扇速度,而不仅仅是完全打开或关闭风扇电机。此外,系统可以自行校准,从而无需安排定期的手动维护。
本文概述了电机控制设计注意事项,例如多电机控制、磁场定向控制、功率因数校正和无传感器控制。它还解决了当今的微控制器 (MCU) 如何为各种应用带来更高的精度、功效和更低的成本。
Piccolo 架构提供令人印象深刻的处理能力,每秒处理 40 至 80 百万条指令 (MIPS)。如此高性能使开发人员不仅可以同时监视和控制多个电机,还可以执行更复杂的控制算法,以获得更高的精度、更平稳的性能和更好的功耗。例如,单个 Piccolo MCU 能够控制两个电机,同时保持主动 PFC 控制,并且仍然具有足够的处理能力来实现电机控制算法,例如无传感器磁场定向控制 (FOC)。
脉宽调制 (PWM) 在生成电机或高性能电源所需的电压或电流方面发挥着重要作用。控制算法的改进使开发人员能够实现高精度算法,提供适应系统行为实时变化的动态控制。FOC 具有许多优点,包括低速下的完整电机扭矩能力、出色的动态行为、较宽速度范围内的更高效率、扭矩和磁通的解耦控制、短期过载能力和四象限运行。然而,FOC 还需要比标准控制方案更复杂的计算。
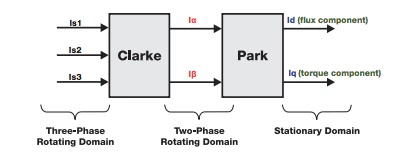
FOC原理是通过对电机相电流进行采样并进行变换来控制定子磁场的角度和幅度分量,以便于控制。电机的三相电流通过 ADC 读入系统。这些相电流处于三相旋转域中,并使用克拉克变换将其变换为二维旋转域。从这里开始,可以使用 Park 变换将两个相变换到平稳域,如图 1 所示。