NF指标使我们能够表征RF组件和系统的噪声性能。对于芯片制造商来说,进行NF测量的能力可以带来巨大的美元价值,因为需要的测量来保证优质产品实际上满足指定的噪声性能,从而可以以高价出售。因此,我们不应该惊讶地发现,几十年来已经进行了大量的研究来改进噪声系数测量的方法。一种流行的技术是 Y 因子方法,这是本文的重点。
使用双端口器件测量噪声系数
考虑一个双端口器件,在T的温度下连接到源极电阻R,如下图1所示。
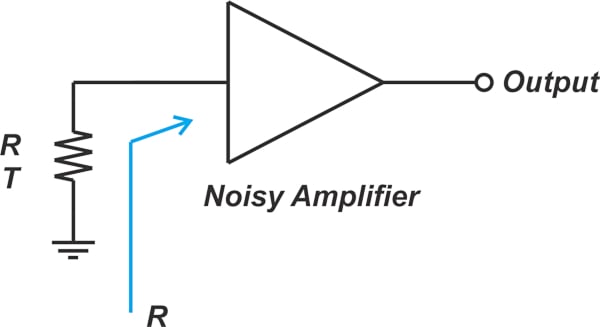
图 1. 连接到源电阻的双端口设备图。
总输出噪声 No与源电阻温度 T 的关系如图 2 所示。

图 2. 显示总输出噪声与源电阻温度的关系图。
如果 RS 无噪声(即 T = 0 K),输出端出现的噪声是被测器件的噪声,用 N 表示o(已添加).当我们提高R的温度时S,其噪声贡献上升。寻找 噪声系数 的设备实际上相当于找到上面的“噪声线”。有两种方法可以指定一条线:通过位于线上的两个点;或通过单个点和线的坡度。Y因子方法实际上测量噪声线的两个点,并使用该信息来查找被测器件(DUT)的噪声因子。另一种噪声系数测量方法是 冷源法 通过查找线路上的单个点以及线路的斜率 (kBG) 来确定噪声因子。
考虑到这一点,让我们看一下 Y 因子方法。
使用 Y 因子方法查找噪声因子
图 3 显示了 Y 因子方法的基本框图。
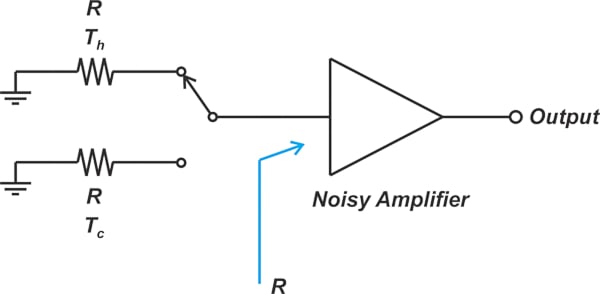
图3. Y因子法框图。
为了找到噪声线的两个不同点,我们需要对输入应用两个不同的噪声电平。所需的输入噪声功率是通过在温度T下连接两个匹配的电阻器产生的c 和 Th 到被测器件的输入。对于Y因子方法,更容易通过等效物对DUT的噪声性能进行建模 噪音温度/ 7e.如果 DUT 添加的输出噪声为 No(已添加),其噪声温度由下式给出:
Te=No(added)kBG
其中 k 是 玻尔兹曼常数,B 和 G 是 DUT 的带宽和可用功率增益。通过噪声温度对组件的噪声进行建模,我们可以很容易地找到两个输入噪声电平的输出噪声。热源在T处的输出噪声功率h 在公式1中给出。
Nh=kThBG+kTeBG" role="presentation" style="box-sizing: inherit; border: 0px; display: inline-block; line-height: 0; font-size: 18.08px; overflow-wrap: normal; word-spacing: normal; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; margin: 0px; padding: 1px 0px; position: relative;">Nh=kThBG+kTeBG
等式 1.
类似地,冷源的输出噪声Tc,可通过公式 2 找到。
Nc=kTcBG+kTeBG" role="presentation" style="box-sizing: inherit; border: 0px; display: inline-block; line-height: 0; font-size: 18.08px; overflow-wrap: normal; word-spacing: normal; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; margin: 0px; padding: 1px 0px; position: relative;">Nc=kTcBG+kTeBG
等式 2.
在上面的一组方程中:
- Te 和产品BG未知
- 两个输入端的噪声温度,Th 和 Tc,以具有高度的准确性而闻名
- N h 和 N c 是测量值
如果我们用方程式 1 除以方程式 2,BG 项就消失了,我们得到方程式 3。
Y=NhNc=Th+TeTc+Te" role="presentation" style="box-sizing: inherit; border: 0px; display: inline-block; line-height: 0; font-size: 18.08px; overflow-wrap: normal; word-spacing: normal; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; margin: 0px; padding: 1px 0px; position: relative;">Y=NhNc=Th+TeTc+Te
等式 3。
这个比率被称为 Y 因子。使用一点代数,上面的等式在等式 4 中给出了 DUT 的噪声温度。
Te=Th?YTcY?1" role="presentation" style="box-sizing: inherit; border: 0px; display: inline-block; line-height: 0; font-size: 18.08px; overflow-wrap: normal; word-spacing: normal; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; margin: 0px; padding: 1px 0px; position: relative;">Te=Th?YTcY?1
等式 4。
有了 T e,我们可以应用以下等式来找到噪声因子:
F=1+TeT0" role="presentation" style="box-sizing: inherit; border: 0px; display: inline-block; line-height: 0; font-size: 18.08px; overflow-wrap: normal; word-spacing: normal; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; margin: 0px; padding: 1px 0px; position: relative;">F=1+TeT0
校准步骤——校准噪声和接收机噪声温度
Y 因子方法原则上很简单。然而,在实践中,有一些复杂的问题需要特别注意。这些错综复杂的问题之一是测量设备增加的噪音。这在下面的图 4 中进行了说明。
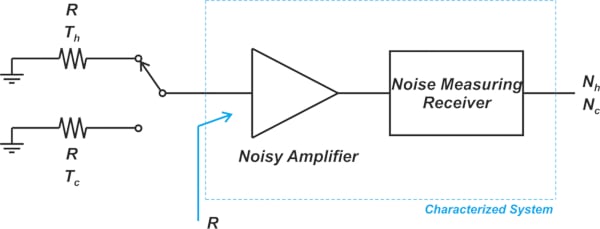
图4. 显示噪声放大器和噪声测量接收器的框图。
如上图所示,测得的输出噪声功率为Nh 和 Nc,受到测量设备噪音的影响。换句话说,通过替换 Nh 和 Nc 在等式3和4中,我们实际上找到了由DUT和测量设备组成的两级级联系统的噪声温度。应用 弗里斯方程,两级级联系统的噪声温度为公式5。
Tcas=TDUT+TReceiverGDUT" role="presentation" style="box-sizing: inherit; border: 0px; display: inline-block; line-height: 0; font-size: 18.08px; overflow-wrap: normal; word-spacing: normal; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; margin: 0px; padding: 1px 0px; position: relative;">Tcas=TDUT+TReceiverGDUT
等式 5.
哪里:
- T欧盟五国 和 T接收器 是被测和检测设备和测量设备的噪声温度
- G被测器 是 DUT 的可用功率增益
当DUT增益超过30 dB时,我们可以忽略第二级的噪声,并假设T中国科学院 ? 吨被测器.但是,当不满足此条件时,我们必须使用校准步骤来纠正第二阶段产生的误差。期间 校准步骤,噪声源直接连接到“噪声测量接收器”,并应用Y因子方法来确定接收器的噪声温度(图5)。

图5. 显示Y因子方法的框图适用于求接收器的噪声温度。
将冷热噪声功率应用于测量设备,我们从校准系统的噪声线获得两个点,NH, Cal 和 NC, 校准.现在我们可以找到校准设置的 Y 因子:
Ycal=Nh, calNc, cal=Th+TReceiverTc+TReceiver" role="presentation" style="box-sizing: inherit; border: 0px; display: inline-block; line-height: 0; font-size: 18.08px; overflow-wrap: normal; word-spacing: normal; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; margin: 0px; padding: 1px 0px; position: relative;">Ycal=Nh, calNc, cal=Th+TReceiverTc+TReceiver
通过重新排列上述等式,我们得到接收器噪声温度:
TReceiver=Th?YcalTcYcal?1" role="presentation" style="box-sizing: inherit; border: 0px; display: inline-block; line-height: 0; font-size: 18.08px; overflow-wrap: normal; word-spacing: normal; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; margin: 0px; padding: 1px 0px; position: relative;">TReceiver=Th?YcalTcYcal?1
总而言之,校准步骤(图5)测量仪器本身并确定T接收器.接下来,在 DUT 就位的情况下(图 4),级联系统的噪声温度 T中国科学院 被发现。,假设DUT的增益是已知的,我们代入T接收器 和 T中国科学院 进入公式5,得到T被测器.大多数情况下,DUT的增益是未知的。但是,上述测量值可用于轻松找到G被测器.
计算被测器件增益
从测量设置中获得的噪声功率—Nh 和 Nc 在图 4 中 — 体验 DUT 的增益;但是,NH, 钙, 和 NC, 校准 没有这种增益(图 5)。因此,G被测器 可以通过公式6估算。
GDUT=Nh?NcNh, cal?Nc, cal" role="presentation" style="box-sizing: inherit; border: 0px; display: inline-block; line-height: 0; font-size: 18.08px; overflow-wrap: normal; word-spacing: normal; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; margin: 0px; padding: 1px 0px; position: relative;">GDUT=Nh?NcNh, cal?Nc, cal
等式 6.
在上一篇文章中,我们讨论了噪声系数定义中使用的功率增益是可用功率增益G一个.应该注意的是,我们从公式6获得的功率增益不等于G一个.为了区分这两种功率量,公式6给出的功率称为插入增益。这将在下一篇文章中更详细地讨论。
插入增益—使用二极管实现噪声源
为了产生所需的输入噪声水平,我们可以在控制的物理温度下使用两个匹配的电阻。例如,通过将电阻器浸入液氮(Tc = 77 K)或液氦(Tc = 4 K)。传统上,热电阻器放置在沸水或冰水中。虽然早期的噪声源依赖于调节源电阻的物理温度,但今天的有源噪声源通常使用二极管或管来提供校准的噪声水平。图6显示了基于二极管的噪声源的简化框图。
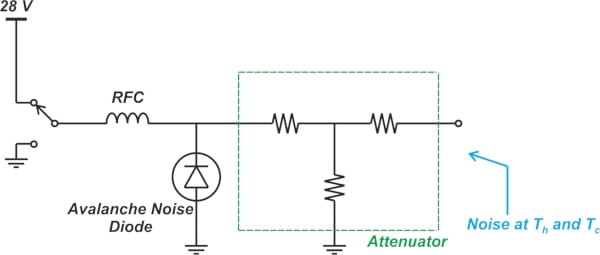
图6. 基于二极管的噪声源的简化框图。
当连接 28 V 电源时,二极管反向偏置到雪崩区,产生大量噪声。另一方面,当电源断开时,输出端只会出现少量噪声。 RF 扼流圈 (RFC) 只是一个足够大的电感器,可以在所有相关频率下被视为开路。衰减器帮助我们降低失配不确定性.它确保无论二极管是导通还是关断,噪声源在输出端都表现出相对恒定、定义明确的匹配。虽然噪声二极管的物理温度为室温,但它会产生异常“热”的噪声水平。例如,在 10,000 K 的范围内,高于任何已知金属的熔点。现代噪声源产生的噪声随时间稳定,频率范围宽,反射系数低。
过大的噪声比公式
过高的噪声比 (ENR) 是表征有源噪声源产生的噪声的常用方法。以分贝为单位的 ENR 定义为:
ENR(dB)=10log(Th?TcT0)" role="presentation" style="box-sizing: inherit; border: 0px; display: inline-block; line-height: 0; font-size: 18.08px; overflow-wrap: normal; word-spacing: normal; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; margin: 0px; padding: 1px 0px; position: relative;">ENR(dB)=10log(Th?TcT0)
在哪里:
- T h 和 T c 是噪声源在其 ON 和 OFF 状态下的噪声温度
- T 0 是 290 K 的参考温度
请注意,ENR 的早期定义是:
ENR(dB)=10log(Th?T0T0)" role="presentation" style="box-sizing: inherit; border: 0px; display: inline-block; line-height: 0; font-size: 18.08px; overflow-wrap: normal; word-spacing: normal; float: none; direction: ltr; max-width: none; max-height: none; min-width: 0px; min-height: 0px; margin: 0px; padding: 1px 0px; position: relative;">ENR(dB)=10log(Th?T0T0)
该定义基于 T c 等于 T 0的假设。在我们的测量中通常不会出现这种情况。然而,噪声源制造商提供的校准 ENR 值通常以 T 0 = 290 K 为参考。例如,如果 ENR 指定为 15 dB,则我们有 T h = 9460.6 K。商业噪声常见的 ENR 值源是 5、6 和 15 dB。也有 ENR 值较高的噪声源,例如 25 dB,但 ENR 值高于 15 dB 的噪声源的可用性是有限的。