电机控制一般使用闭环控制,这就必须使用传感器,如:霍尔传感器、编码盘等。
但是有的应用场合下,难以安装霍尔传感器、编码盘,或者就算是安装好,也很容易损坏。
霍尔传感器、编码盘都属于位置传感器。那么,无位置传感器,是否也能控制电机?
答案是可以的。
二、方案
VBUS测量电机的母线电压,假设电机由直流50V供电,则测量直流50V;由交220V供电,则测量直流310V。
IBUS测量电机总电流,可用于防过流、电流环控制。
Demand是给定的转速,用滑动电位器模拟转速的输入。
AN3、AN4、AN5引脚,用于测量电机的三相电压。

这样一来,没有了位置传感器,大大简化了设备的安装步骤。但是,会产生另外的一些问题。
电机如何启动?如何换相?如何调速?
三、硬件
MOS管驱动使用L6388ED,其内部逻辑可以防止高边和低边MOS管同时导通。有自举电容让高边MOS导通。
在单片机初始化时,要给L6388ED的自举电容充电一段时间,否则高边MOS管可能不导通,或者不完全导通。
L6388ED内部框图如图所示。LIN=1,HIN=0,则LVG导通,HVG不导通,Cboot充电。
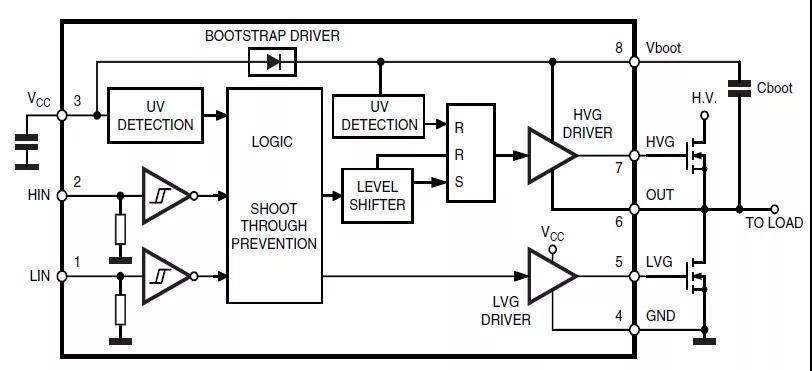
L6388ED自举电容的容值可以由手册上的公式计算得出,我这里控制低速电机,用的是10uF。
一旦自举电容充完电手,MOS管可以在一段时间内不需要充电,一般是电机每次启动时充电。
建议使用15V给L6388ED供电,使用12V的话,可能让MOS不导通或不完全导通,如下图所示。
测量三相电压,如下图所示,NET_W是W相的电压,而W可以直接接单片机的ADC,C11为100nF电容,该电容可以平滑相电压,不能去掉,否则无法检测反电动势。U相和V相与此类似,这里不再赘述。

平滑之后的波形,呈马鞍型,如下图所示。
四、单片机算法
该算法分三个部分,对齐转子、开环强制换相、利用反电动势闭环换相。
4.1 对齐转子。
先给自举电容充电,然后强制给某一相PWM,让转子对齐在一个固定的扇区。
这种方法在绝大多数的情况下都能对齐,若不能对齐,会启动失败,此时,重新启动即可。
对齐转子的时间不宜过长,针对本文的低速电机,对齐时间约200ms。
4.2 开环强制换相。
这里的开环是指未检测到反电动势,强制输出PWM,并且在预算好的时间换相,从而让电机转起来。
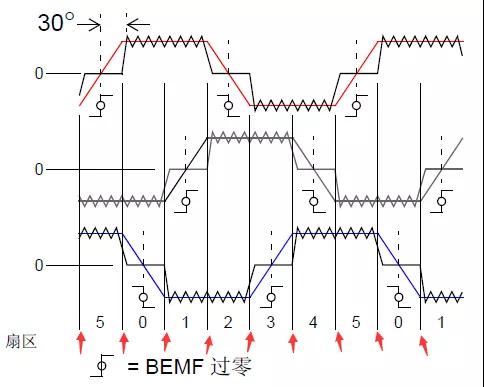
换相的方法,不同的电机可能不一样(如:极数不同),这里使用六步换相,如下图所示。
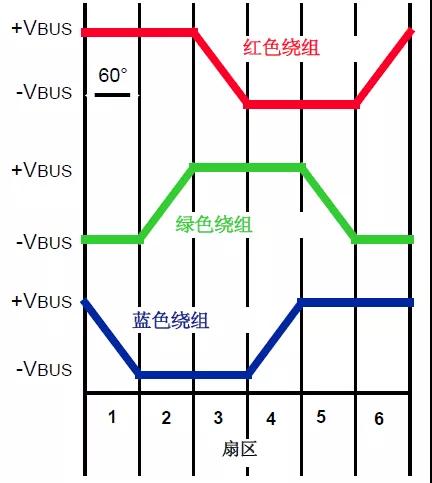
其中,+VBUS表示上桥臂给PWM,-VBUS表示下桥臂给高电平导通,斜线表示上、下桥臂均不导通。
上、下桥臂均不导通时,电机会产生反电动势。
4.3 利用反电动势闭环换相。
理想情况下,上、下桥臂均不导通时,在电机某一相电压检测到反电动势过零,但是过零时刻和实际要换相的时刻,相差30度角。所以,在检测到反电动势过零之后,要延时30度,再换相。
实际情况下,延时的30度还要根据单片机内部的ADC采样,滤波算法进行补偿,这里的补偿的角度一般是超前的。
假设超前x度,那么实际换相时刻为(30-x)度。
BEMF就是反电动势,红色箭头指向的是换相时刻,如下图所示。
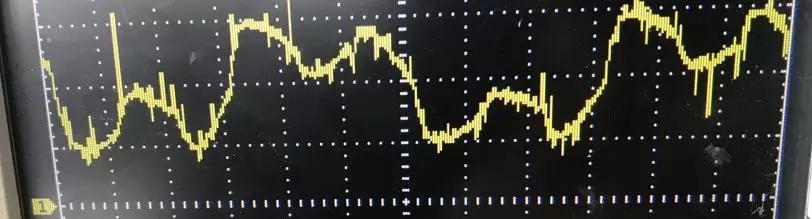
但是,ADC采样的电压都是正电压,没有负,那就需要构造一个虚拟中性点。
把三相电压加起来取平均值,就是虚拟中性点。如下图所示。
把虚拟中性点当作是零点,这样就能做到过零检测。
虚拟中性点并不是一个恒定值,它的波形如下图所示,类似正弦波。

检测反电动势过零,有两种方法,一种是比较器,另一种是ADC采样后滤波。
用比较器的方法,优点是减少单片机的运算量,缺点是增加硬件成本。
用ADC采样的方法,优点是减少硬件成本,缺点是增加单片机的运算量。
由于这里需要用到的ADC采样率要求不高(20KHz SPS),所以用单片机内部集成的ADC即可。
这里采用ADC采样的方法。其滤波算法称为择多算法,在另一篇博文再详细介绍。
五、注意事项
1、ADC要在PWM高电平的中部采样,可以避免毛刺的干扰。
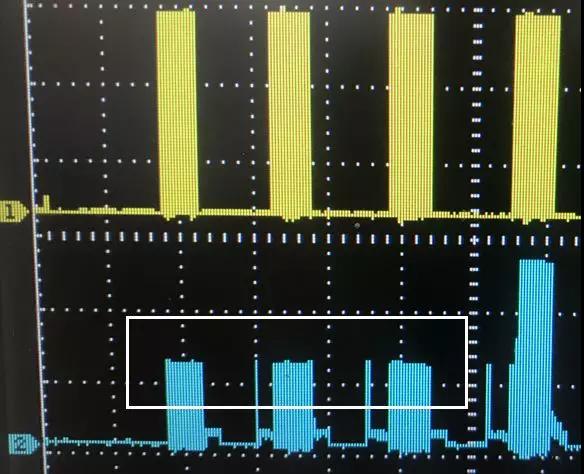
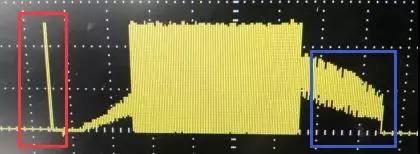
2、六步换相的步调必须正确,否则无法检测反电动势。
六步换相有问题,可能不出现红圈中的竖线,也可能不出现蓝圈中的反电动势。反电动势有问题,电机无法加速。
3、可以使用互补的PWM,也可以使用上桥臂为PWM,下桥臂为高低电平。
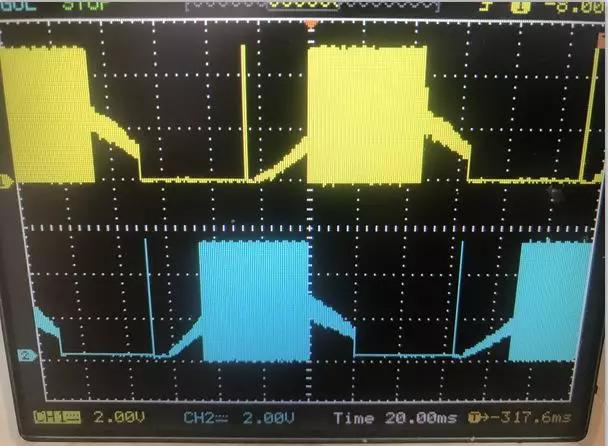
4、黄色为经过比较器后的波形(非本文使用的方法),蓝色为经过电阻分压和电容滤波后的波形。如下图所示。

经过比较器后的波形会产生三条竖线,这三条竖线是由于换相引起的,所以在换相时,不判断过零。在不换相时,去抖,判断边沿翻转即是过零点,此方法比ADC滤波要简单一些。
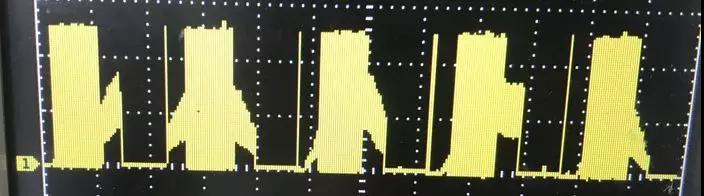
5、换相时刻不正确的波形,如下图所示。
无位置传感器的电机控制暂时就讲解到这里,从上文,大家或许无位置传感器的电机控制存在影响较大,因此发烧友学院一直在致力于寻找有实战经验的硬件教育团队,联合一起策划张飞团队新推出了一门全硬件无位置马达驱动器套件的系统培训课程,希望能帮助硬件工程师们能快速入门学会并在工作中去应用。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。