步进电机作为执行元件,是机电一体化的关键产品之一,广泛应用在各种自动化设备中。步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角)。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。
那么什么是混合式步进电机,混合式步进电机和反应式步进电机有什么区别吗?接下来跟随小编详细的来了解一下混合式步进电机。

混合式步进电机是综合了永磁式和反应式的优点而设计的步进电机。它又分为两相、三相和五相,两相步进角一般为1.8度 ,三相步进角 一 般为 1.2度 ,而五相步进角 一 般为0.72度。
混合式步进电机的转子本身具有磁性,因此在同样的定子电流下产生的转矩要大于反应式步进电机,且其步距角通常也较小,因此,经济型数控机床一般需用混合式步进电机驱动。但混合转子的结构较复杂、转子惯量大,其快速性要低于反应式步进电机。
1、输出转矩大,高转速。
2、电机发热小,噪音低,效率高。
3、高速停止平稳快速,无零速振荡运行平稳,振动噪声小。
4、响应速度快,适合频繁启停的场合。
混合式步进电机的结构与反应式步进电机不同,反应式步进电机的定子与转子均为一体结构,而混合式电机的定子与转子都被分为下图所示的两段,极面上同样都分布有小齿。
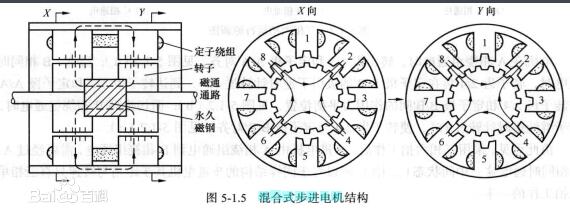
定子的两段齿槽不错位,上面布置有绕组。上所示为两相4对极电机,其中的l、3、5、7为A相绕组磁极,2、4、6、8为B相绕组磁极。每相的相邻磁极绕组绕向相反,以产生上图中x、y向视图中所示的闭合磁路。
B相与A相的情况类似。转子的两段齿槽相互错开半个齿距(见图5.1.5),中间用环形磁钢连接,两段转子的齿的磁极相反。根据反应式电机同样的原理,电机只要按照A—B—A—B—A或A—B—A—B—A的顺序通电,步进电机就能逆时针或顺时针连续旋转。
显然,同一段转子片上的所有齿都具有相同极性,而两块不同段的转子片的极性相反。混合式步进电机与反应式步进电机的区别在于当磁化的磁性材料退磁后,则会有振荡点和失步区。
混合式步进电机的转子本身具有磁性,因此在同样的定子电流下产生的转矩要大于反应式步进电机,且其步距角通常也较小,因此,经济型数控机床一般需要用混合式步进电机驱动。但混合转子的结构较复杂、转子惯量大,其快速性要低于反应式步进电机。
1、标准型 两相步进电机

2、标准型 三相步进电机

3、经济型 两相步进电机

4、经济型 三相步进电机

1、在结构和材料上不同,混合式电机内部具有磁性材料,故混合式电机有自阻(即在电机未加电的情况下有一定的自锁力),而反应式电机没有自阻。
2、在运行性能上有差别,混合式电机运行时相对较平稳,输出力矩相对较大,运行声音小。
3、两种电机在价格上有差别,反应式电机相对混合式电机而言要便宜。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。