众所周知,步进电机的驱动方式有整步,半步,细分驱动。三者既有区别又有联系,目前,市面上很多驱动器支持细分驱动方式。
大家都知道步进电动机是一种把电脉冲信号转换成机械角位移的控制电机,常作为数字控制系统中的执行元件。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(这个角度叫做歩距角)。
正常运动情况下,它每转一周具有固定的步数;做连续步进运动时,其旋转转速与输入脉冲的频率保持严格的对应关系,不受电压波动和负载变化的影响。本文小编将带领大家详细的了解步进电机整步驱动、半步驱动、细分驱动的工作原理及优缺点。
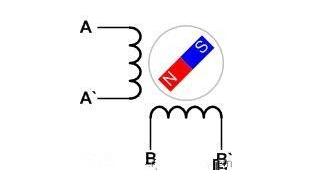
如下图是两相步进电机的内部定子示意图,为了使电机的转子能够连续、平稳地转动,定子必须产生一个连续、平均的磁场。因为从宏观上看,电机转子始终跟随电机定子合成的磁场方向。如果定子合成的磁场变化太快,转子跟随不上,这时步进电机就出现失步现象。
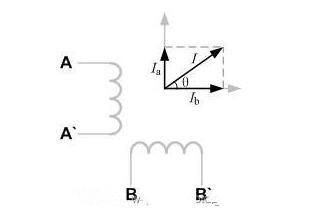
既然电机转子是跟随电机定子磁场转动,而电机定子磁场的强度和方向是由定子合成电流决定且成正比。即只要控制电机的定子电流,则可以达到驱动电机的目的。下图是两相步进电机的电流合成示意图。其中Ia是由A-A`相产生,Ib是由B-B`相产生,它们两个合成后产生的电流I就是电机定子的合成电流,它可以代表电机定子产生磁场的大小和方向。
基于以上步进电机的背景描述,对于步进电机的整步、半步、细分的三种驱动方式,都会是同一种方法,只是电流把一个圆(360°)分割的粗细程度不同。
1、整步驱动
对于整步驱动方式,电机是走一个整步,如对于一个步进角是3.6°的步进电机,整步驱动是每走一步是走3.6°。
下图是整步驱动方式中,电机定子的电流次序示意图:
由上图可知,整步驱动每一时刻只有一个相通电,所以这种驱动方式的驱动电路可以是很简单,程序代码也是相对容易实现,且由上图可以得到电机整步驱动相序如下:
BB’→A’A→B’B→AA’→BB’
下图是这种驱动方式的电流矢量分割图:
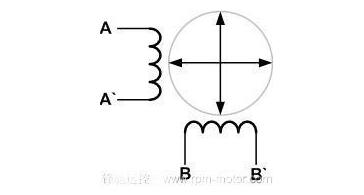
可见,整步驱动方式的电流矢量把一个圆平均分割成四份。
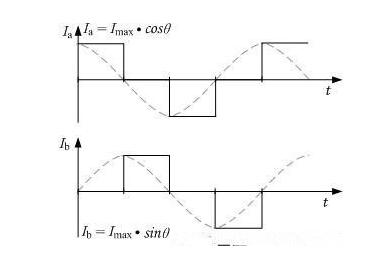
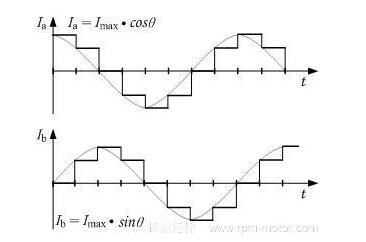
下图是整步驱动方式的A、B相的电流I vs T图:
总结:
可以看出,整步驱动的缺点:描出的正弦波是粗糙的。使用这种方式驱动步进电机,低速时电机会抖动,噪声会比较大。但是,这种驱动方式的优点:无论在硬件或软件上都是相对简单,从而驱动器制造成本容易得到控制。
2、半步驱动
对于半步驱动方式,电机是走一个半步,如对于一个步进角是3.6°的步进电机,半步驱动是每走一步,是走1.8°(3.6°/2)。
下图是半步驱动方式中,电机定子的电流次序示意图:
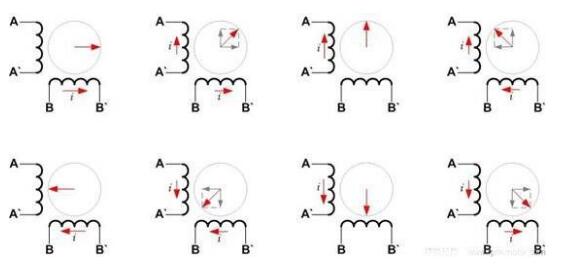
由上图可见,半步驱动方式的比整步驱动方式相对复杂一些,在同一时刻,可能两个相都需要被通电,如果要求电机转动的力矩平稳,则需要在两相同时通电时,通电电流应该为单相通电电流的sin(45°),即√2/2。当然,可以直接通以和单相通电流相等的电流,结果是电机转动过程中的力矩不恒定,但它带来的好处是驱动电路或软件编写的简化。
以下是这种的驱动方式的驱动相序:
BB’→BB’ A’A→A’A→B’B A’A→ B’B→B’B AA’→AA’→ AA’ BB’
如果需要反转,只需按以上相序的逆向进行通电即可。
当按以上相序对电机通电,产生的电流矢量则可以把一个圆分割成8份,如下图所示:
半步驱动一方面使电机的步进分辨率提高了一倍,且电机运转会更为平稳。
对比地,半步驱动方式的两相电流图如下图所示:
总结:
由上图看出,半步驱动方式的优点:描出的正弦波较之整步驱动方式,有了改观,提高了。这样的好处是在无需更改电机的情况下,电机的步进角分辨率提高了一倍,且电机运行相对安静一些。
3、细分驱动
如下图,可以看出某种规律:
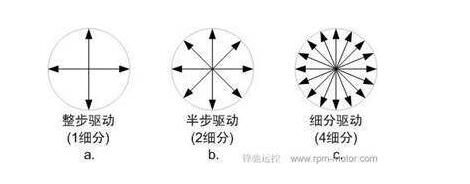
看上图,电流矢量分割圆越来越稠密,如上图的c。这是4细分驱动的分割图,从宏观上可想象,电机转子走一步的角度将会随着细分数的增加而减小,电机转动也越来越平稳、安静。从某种意义上,整步和半步驱动也是细分驱动的一样,它们的关系就如正方形和长方形的关系。
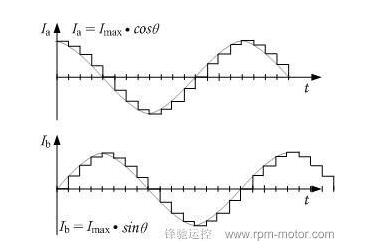
上图是4细分驱动方式的两相电流图,由图看出,这时每相电流的曲线较半步驱动时的电流曲线更加细腻。
电流细分是细分驱动的其中一种方法,恒流的实现常用斩波驱动,给定的电流是以正弦波分布。另一种为电压细分,这种方法是比正弦波的电压驱动电机的线圈,可以不需要反馈地实现电机的细分驱动,但是由于电机的反电势等的作用,正弦波电压驱动并不能产生正弦波的电流,效果没有电流细分好,但是它的驱动电路相对简单。
总结:
细分可以提高电机的步进角分辨率,但是,这并不是细分驱动的初衷,而是为了减缓步进电机运转过程的震动和噪声,使电机的力矩输出更平稳。这有点像数码相机的光学变焦和数字变焦的关系,提高步进系统分辨率依靠电机本身和机械结构。
在工程应用中,电机的细分数可能不同,在低速时,可增大细分数,当速度增加时,减少细分数。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。