众所周知,汽车无人驾驶已成为汽车发展的一种趋势,它对汽车ECU系统数量和质量有了更大的需求。目前主流的电子架构体系已逐渐显露出不足,而车载以太网因其具众多优点,必然会在汽车车载网络中普遍应用。本文将从入门者的角度,讲解车载以太网中的重要知识。
01车载以太网的组成
车载以太网用于连接汽车内不同电气设备的一种网络,从而满足车载环境中一些特殊需求,它与传统以太网不尽相同,车载以太网主要由MAC(介质访问控制)、PHY(物理接口收发器)组成,与传统以太网不同,车载以太网固定为全双工通信方式,出于对汽车启动时间的考虑而没有引入自动协商机制,此外车载以太网是通过单对非屏蔽或屏蔽电缆连接,与之对应的100M的MDI接口为100Base-T1,以此满足EMC要求。
MAC是介质访问控制的英文简称,它位于OSI七层模型中数据链路层的下半部分,主要负责控制与连接物理层的物理介质,它一端通过PCI总线连接计算机,另一端通过MII连接PHY。在发送数据时,MAC协议会判断当前是否适合发送数据,若能,它会在将要发送的数据上附加一些控制信息,终使数据以规定的格式到达物理层;在接收数据时,它会判断数据是否有错误,如果没有错误的话,它会去掉附加的控制信息发送至LCC(逻辑链路控制)子层。
PHY是物理接口收发器,它实现了以太网的物理层。PHY在发送从MAC接收到的数据时,会将该并行数据转化成串行数据,之后再转化为模拟信号发送;在接收数据时过程相反。
02MAC与PHY的接口连接
MAC与PHY之间通过两个接口连接,分别为SMI接口和MII接口。MII是介质独立接口,以太网MAC通过该接口发出数据帧经过PHY后传输到其他网络节点上,同时其他网络节点的数据先经过PHY后再由MAC接收;SMI全称是串行管理接口,以太网MAC通过该接口可以访问PHY的寄存器,通过对这些寄存器操作可对PHY进行控制和管理。
SMI接口包括MDIO(控制和管理PHY以获取PHY的状态)和MDC(为MDIO提供时钟)。MDC由MAC提供,MDIO是一根双向的数据线。用来传送MAC层的控制信息和物理层的状态信息。MDIO数据与MDC时钟同步,在MDC上升沿有效。
MII接口有MII、RMII、SMII、SSMII、SSSMII、GMII、SGMII、RGMII等。这里简要介绍其中的MII和RMII,如下图所示。
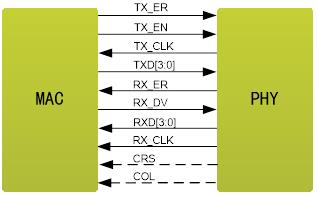
图1 MII接口
MII共使用了16根线。其中CRS与COL只在半双工模式有效,而车载以太网固定工作在全双工模式下,故应用在汽车环境需要14根线。
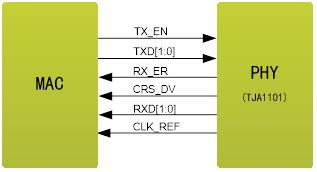
图2 RMII接口
RMII:精简版的MII,数据发送接收均为两根,相比MII减少了4根,另外它整合或减去了一些线,终RMII只有8根线。
03PHY的常用功能解读
3.1PHY的回环模式
为了诊断以太网工作时出现的问题,需要给问题定位,PHY的回环模式就是起着这样的作用,回环是指数据从一端发送经过一段路径后又回到该端,相当于自发自收,一般PHY都有三种回环模式,分别为内部回环,外部回环和远程回环,它们的回环路径不同。下面简要介绍下这三种回环模式。
3.1.1 内部回环
在内部回环模式,PCS接收模块直接从PCS发送模块获得数据,如图3所示。此操作允许MAC将通过MII发送功能发送的数据包与从MII接收功能接收的数据包进行比较,因此,验证100Base-T1 PCS的状态。

图3 内部回环
3.1.2 外部回环
在外部回环模式下,PMA接收模块直接从PMA发送模块接收信号,如图4所示。这种外部回环测试允许MAC将通过MII发送功能发送的数据包与从MII接收功能接收的数据包进行比较,因此,验证100Base-T1 PCS和PMA的状态。
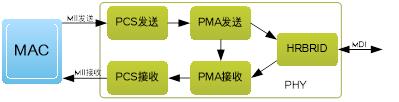
图4 外部回环
3.1.3 远程回环
在远程回环模式下,MDI上链接伙伴接收的数据包通过PMA接收和PCS接收模块传送到PCS发送模块,后者又将其发送回链接伙伴。PCS接收数据可在MII上获得。远程回环允许MAC将发送到MDI的数据包与从MDI接收回的数据包进行比较,从而验证物理信道的状态,包括100Base-T1 PHY。如图5所示。

图5 远程回环
3.2 PHY的电源模式
为了进一步降低系统功耗,一些PHY都支持多种电源模式,主要包括正常模式、待机模式和睡眠模式。
以太网要正常建立连接,PHY必须处于正常模式,在PHY上电后,一般不会马上就工作在正常模式,而是待机模式。在待机模式下,PHY的ECU主电源被激活,功耗相对睡眠模式略高,睡眠模式是PHY工作功耗的模式,如果网络中暂时不需要节点的功能,可使节点工作在睡眠模式,在睡眠模式下,此时节点可断电整个ECU,除了唤醒检测外,关闭所有内部功能。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。