本文主要讲了一下关于自动控制原理闭环的概念,希望对你的学习有所帮助。
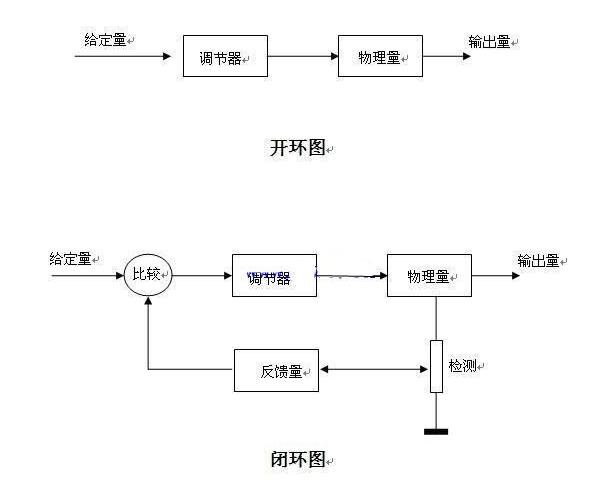
1、任何一个自动控制都有确定的“物理量”作为控制对象,举例说“速度”、“电流”……;
2、任何一个自动控制都必须有可用来调节控制对象大小的“调节器”;
3、这个调节器能对输入给定信号,有足够的放大倍数,以提高调节的灵敏度和度,这个放大倍数叫做开环放大倍数K;
4、任何一个自动控制都必须有对控制对象的适时有效检测,适时知道被控对象参数的大小;
5、任何一个自动控制都要有检测反馈环节,即从调节器的输出端到输入端的反馈环路;
6、任何一个自动控制都会将给定信号与检测反馈信号“比较”所得的偏差,作为调节器的输入信号;
7、调节器有三种型号:
1)当调节器的输出量与输入量成比例P,称为比例调节器;
2)当调节器的输出量是输入量的积分I,称为积分调节器;
3)当调节器的输出量是输入量的微分D,称为微分调节器
8、P,称为比例调节器,能使“偏差”迅速减小;
9、I,称为积分调节器,能使小“偏差”归于零;
10、D,称为微分调节器,能使“偏差”的变化率减小;
11、所以几乎所有自动闭环控制,一般会有三个P、I、D参数的调整;
12、P参数调合适,会是偏差迅速减小而不会“矫枉过正”
13、I参数调合适,会是小偏差尽快消失为零,控制准确;
14、D参数调合适,会使偏差剧烈变化时迅速恢复平静,控制稳定性好;
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。