摘要:基于GPS/BD兼容高灵敏度导航产品开发和产业化项目,对经典载波跟踪环进行修改,设计实现了高灵敏度跟踪环路。将传统的单点积分数据,转化成一列数据,对该数据进行FFT变换后,可提高载波频率的估计,从而提高系统的跟踪灵敏度。并对高灵敏度跟踪环路进行仿真分析,证明高灵敏跟踪环路对弱信号的跟踪能力。
0 引言
卫星导航系统GNSS(Global Navigation Satel-lite System)在政治、经济以及军事等多个领域都具有重要意义。从飞机、汽车到个人手持通信终端,都能看到GNSS定位技术,GNSS系统在民用领域应用十分广泛,对国民经济建设也起到了重要作用。目前已经使用和公开研制的GNSS 系统一共有以下四个,美国的GPS 导航系统、俄罗斯的GLONASS 导航系统、欧盟的GALILEO导航系统和中国的北斗导航系统。
随着技术的进步、应用需求的增加,卫星导航以全天候、自动化、高效率、高等显着特点及其所独具的定位导航、精密测量、授时校频等多方面的强大功能,已涉足众多的应用领域,使卫星导航成为了继蜂窝移动通信和互联网之后的第三个IT经济新增长点。随着我国自主卫星导航系统北斗系统建设的全面展开,北斗的应用将迅速推广,结合卫星导航与通信、多媒体等的多方面需求。面向大众及行业的导航应用,研制高性能多模高灵敏度导航基带芯片及多模导航基带IP 核,将对提高我国导航产品技术水平和市场占有率,为重大专项典型示范项目提供自主芯片和解决方案。
天线接收到的GPS 信号功率一般为-130 dBm,但在室内、森林、城市等复杂环境下,GPS信号验证衰减可达20~30 dB,此时普通GPS 接收机不能实现正确的捕获和跟踪。本文基于了高灵敏度数字基带芯片的研究背景,对经典载波跟踪环进行修改,设计实现了高灵敏度跟踪环路设计,高灵敏跟踪环路接收机实现了正确的捕获和跟踪。
1 自主跟踪环路设计
1.1 自主跟踪环路设计
卫星信号由3部分组成:导航电文、伪随机扩频(C/A)码和载波。基带信号处理器同步过程包括捕获和跟踪。捕获是一个对卫星和接收机相对运动引起的载波多普勒频偏和C/A 码相位偏移进行粗略估计的二维搜索过程,捕获完成后这两个参数用来初始化跟踪环路。
跟踪环路进行了地相位同步和跟踪,从而实现了载波的剥离和C/A码的剥离,终得到了导航电文用于导航解算。
自主捕获通道所得结果中的卫星号、扩频码相位这些信息输入至卫星扩频码产生器,启动了扩频码序列的产生,包括超前0.5 码片、即时码片和滞后0.5 码片共3 路序列,然后与本地伪码信号进行相关处理,通过扩频码跟踪环路与载波跟踪环路的有关运算,使载波环路和码环路保持了锁定状态。程序结构如图1所示。
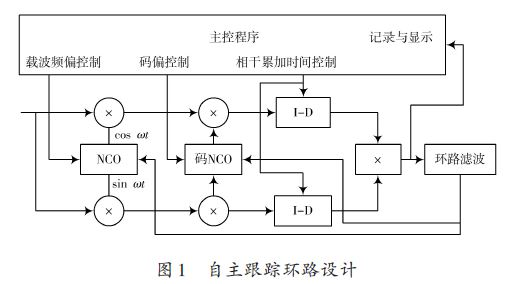
跟踪环路包括了载波跟踪环和码跟踪环,两个环路相互影响,只有两个环路同时锁定时,才能解调出导航电文。载波跟踪环路对环境噪声、晶振的相位噪声和动态应力等更加敏感,比码跟踪环路更容易失锁,因此成为接收机的关键和设计难点。
1.2 码跟踪环路
由于码跟踪环DDLL算法可用软件实现,并能保证伪码延时到1%个码片内。因此,自主码跟踪环采用了此方法进行伪码相位跟踪的,即利用本地码发生器产生了相位超前、滞后信号并与输入的信号相关,比较两支路结果以获取码相位误差信号来控制码DCO并产生与输入码相位一致的本地码信号。
码环鉴相器的输入为同相/正交支路码相位超前/滞后的相关信号。码相关发生时环路进入了跟踪状态,假定d = 2δ,d 为相位超前与滞后支路的相位间隔,则超前一滞后型非相干DDLL环的控制量B(k) 可由式(1)获得:

分别表示鉴相器的增益系数和鉴相特性函数。GPS C/A码的码长为L = 1 023,BD C/A码的码长为L = 2 046,码元宽度为tc =20 ms,其相关函数为:

由此可得鉴相器的鉴相特性函数:

鉴相特性函数为相关间隔与码相位偏差的函数。
若定义(-δ,δ) 为鉴相线性范围,鉴相特性函数在ε = 0 处的斜率D′(ε,δ) 为DDLL环的鉴相增益,Dmax (ε,δ) 为跟踪牵引范围。
1.3 载波跟踪环路设计
载波的同步包括了捕获和跟踪两个过程,载波捕获即多普勒频移的粗略估计已由快捕通道的捕获算法完成,而的载波相位及多普勒频移跟踪则通过反馈跟踪控制环路实现。本方案采用一种非相干的FLL环--叉积自动频率跟踪环(CPAFC)加锁相跟踪算法作为载波跟踪方法。在通过捕获算法进行伪码捕获后,载波多普勒频移范围被“牵引”到了500 Hz,为了使多普勒频移进入叉积鉴频器的线性工作范围,算法上首先采用叉积鉴频器将频率从几百赫兹降到几赫兹,然后利用锁相环进行的频率跟踪。
叉积自动频率跟踪环鉴频算法为:
假定连续量测过程中调制数据位不变,即有D(k)D(k - 1) = 1.在预检积分时间内载体机动造成的频率偏移可视为恒值,则有Δfd ≡ Δfd (k) = Δfd (k - 1) 成立。而由于Φk = Δfd (k) - tk + Φ0 ,则:

输出与单位时间间隔内的相位变化成正比,可以用此输出量控制载波DCO 以达到频率跟踪的目的。该算法上要求在同一数据位内计算,在信噪比较低的情况下仍能取得较好的性能[7].
设定相干积分时间为20 ms,载波固定频偏为2 Hz,环路带宽为10 Hz,当输入信号由-140 dBm 减弱至-160 dBm 时的仿真效果图如图2~图5所示。
由图2~图5 可知,当输入信号功率小于-150 dBm时,采用传统的环路跟踪策略已经不能实现稳定的跟踪,必须要设计新的跟踪方法。


2 高灵敏的跟踪环路设计
在现有多款GPS、BD、GLONASS接收机基带算法和电路基础上,利用GNSS 研发平台和开发板,进一步试验和验证提高接收机自主灵敏度的方法。采用共用式匹配滤波器和相关器等灵活高效的电路结构,匹配滤波器用于搜索和捕获,相关器用于跟踪。不同通道、GPS和北斗二号分时共用同一匹配滤波器和相关器,以电路速度换取电路规模等手段,提高了系统的处理能力,从而达到了提高捕捉灵敏度,减小启动时间,减少伪捕捉现象,减小电路规模等目的。
算法上,采用了相干积分与非相干积分相结合的办法实现弱信号捕捉与跟踪。相干积分的效率高于非相干积分,但相干积分受比特符号反转的限制,且会减小频率搜索的步长,相干积分时间难以很长,所以只能采用相干积分与非相干积分相结合的办法,可将总的积分时间增加到秒级,以达到高灵敏度的目的。
依照如图6所示将经典载波跟踪环做出修改,思想是将传统的单点积分数据转化成一列数据,对该数据进行FFT变换后,可提高载波频率的估计,从而提高系统的跟踪灵敏度,基本达到了高灵敏度跟踪环路设计的要求。设定相干积分时间PIT=20 ms,预设频偏为20 Hz,当输入信号功率为-150~-160 dBm 时的仿真图如图8~图9所示。


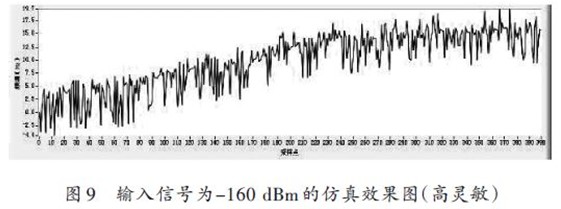
由图7~图9可知,在弱信号情况下,环路依旧具备较强的频率跟踪能力。
3 结语
本文基于数字基带芯片的研究背景,设计并实现了GPS和BD2载波跟踪环路设计。提供了一种高灵敏的载波跟踪环路的仿真与实现,是高灵敏度接收机实现的技术。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。