高速贴标机对速度和位置控制要求很高,传统采用PLC直接发送脉冲的方式性能欠佳。我们设计的新型控制系统采用台达A2系列型伺服驱动器,利用其内置运动控制功能,弥补了PLC脉冲控制方式因扫描周期带来的不足,具有高速、高、经济和可以快速适应市场需求变化等优点。经实践检验,效果相当理想。
引言:
随着生产效率的提升和产品形象提升的需要,企业对产品包装上产品标签的贴置速度和有了相当高的要求,这就给贴标设备生产商带来了挑战性的问题,既要生产出有市场竞争力的产品,又要尽可能的降低成本。我们采用台达DVP28SV11T型PLC、DOP-B05S100型触摸屏和ASD-A2-0421-B型伺服驱动器完成项目,同时还可以完成圆瓶的贴标动作。经实践检验,效果相当理想。设备如图1所示。

一、高速贴标机工作原理:
高速贴标机不干胶贴标机电机驱动、分别调速,光电控制。采用先进的步进电机,能自锁,定位可靠、灵敏度高。主要控制零部件采用美国、日本、德国电器产品,配合与维修方便。根据用户需要求可以安装热打码机,选用不同的色带随时可以打印各种色彩的批号、字迹清楚、牢固。
高速贴标机原理简图如图2所示。贴标机上装有工作物检测、前标标签检测、后标标签检测、前标存量检测、后标存量检测和瓶底检测传感器。
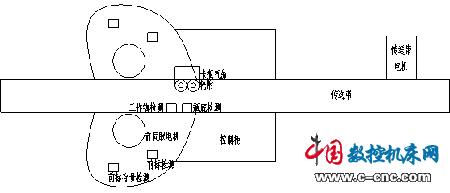
当切换到贴圆瓶标签工作状态时,由前标侧伺服电机执行动作,且需要卡瓶气缸动作使用轮附卡住工作物。工作物传送带有低速和高速两种状态,故伺服驱动器亦有低速和高速两种状态,需要根据传送带的速度选择调节参数以协调贴标动作。
二、项目设计:
根据设备工作要求,需要:①PLC进行整体动作逻辑控制;②触摸屏以进行设备操作和参数调整;③前标和后标两套伺服驱动装置;④传送带拖动设备;⑤轮附驱动设备。控制系统框图如图3所示。
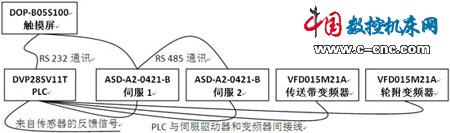
贴标机动作由伺服驱动器即A2伺服驱动器的运动控制功能,即Pr模式实现;PLC完成传感器信号的逻辑处理和进行A2 PATH路径选择及路径触发。采用RS-232通讯将触摸屏和PLC连接起来以进行机器的动作逻辑控制;采用RS-485通讯连接触摸屏和前标、后标两台A2伺服驱动器,以根据工艺要求对相关驱动器参数,如速度和延时时间等参数进行修改。
三、路径规划及时序:
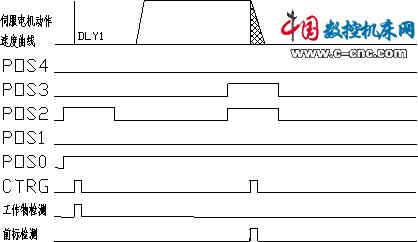
根据台达A2伺服运动控制Pr模式设计伺服驱动器的动作路径和触发时序。图4为该工况的时序。在PLC程序中该动作程序分支中输出需要的路径选择电平,当检测到工作物时,以中断方式触发,输出CTRG触发信号,即A2伺服路径的触发脉冲,此时A2伺服将根据事先内部设置的该路径动作参数驱动伺服电机。其余动作实现方式的时序与此类似。对于停止路径,为了使电机停止平稳,且每次的停止距离相等,在A2伺服该路径的相关参数中设置一定的停止距离,以使每次的停止曲线如图4阴影部分所示。这样做的目的就是使每贴标动作的位置。
四、结论:
使用本文中的项目设计及实现方法,可以在出色完成控制任务的同时实现低成本,并且可快速适应市场需求而生产完成不同动作要求的贴标设备。中达电通股份有限公司的A2高性能伺服驱动器的内置Pr运动控制功能以其出众的性能使用户得到了的经济效益。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。