CANbus TDM是为力科示波器提供的一种功能强大的触发、解码和测量/图示工具,将大大提高调试和验证CAN ECU或网络性能的能力。它把示波器的物理层分析功能与基于消息的触发、协议解码及CAN特定测量和图示结合在一起。时分复用器是一种利用 TDM 技术的设备,主要用于将多个低速率数据流结合为单个高速率数据流。来自多个不同源的数据被分解为各个部分(位或位组),并且这些部分以规定的次序进行传输。这样每个输入数据流即成为输出数据流中的一个"时间片段".必须维持好传输顺序,从而输入数据流才可以在目的端进行重组。特别值得注意的是,相同设备通过相同 TDM 技术原理却可以执行相反过程,即:将高速率数据流分解为多个低速率数据流,该过程称为解除复用技术。
力科CAN触发具有的能力,可以触发数据帧、远程帧或错误帧。用户可以自定义数据帧或远程帧的ID值和DATA值。此外,它可以与力科SMART触发结合使用,提供按时间和信号判定的触发功能。
图1显示了一个典型触发设置,其中CAN触发与判定SMART触发相结合,选择一条特定的CAN总线消息。在这一设置中,根据代表着到传感器输入的模拟电压启动或判定触发。这个电压应用到示波器的通道2,在源电压超过5 V时启动触发。在这种情况下,预计触发点是包含传感器峰值输入值的消息帧。传感器使用ID 210,在传感器输入达到5 V后,CAN触发设置成触发ID 210,如图2所示。
可以通过的CAN Bus TDM参数"CAN to Value"读取和转换消息内容。图1中的曲线F1显示了参数值按时间对准的追踪图。CAN总线TDM画面,即图1中的曲线CA,显示了半秒的CANBus业务。CAN Zoom扩大了触发示波器的消息视图,解码CAN消息的ID、DLC、DATA和CRC字段。
CANBus应用一种面向位型的损伤仲裁方法来解决媒体多路访问带来的冲突问题。其仲裁过程是:当总线空闲时,线路表现为"闲置"电平(recessive level),此时任何站均可发送报文。发送站发出的帧起始字段产生一个"占有"电平(dominant level),标志发送开始。所有站以首先开始发送站的帧起始前沿来同步。若有多个站同时发送,那么在发送的仲裁场进行逐位比较。仲裁场包含标识符ID(标准为llbit),对应其优先级。每个站在发送仲裁场时,将发送位与线路电平比较,若相同则发送;若不同则得知优先级低而退出仲裁, 不再发送。系统响应时间与站点数无关,只取决于安排的优先权。可以看出,这种媒体访问控制方式不像Ethetnet的CSMA/CDCA协议那样会造成数据与信道带宽受损。
除边沿或越过门限的判定标准外,示波器可以根据模拟输入的状态进行判定。在这种情况下,必须保持某种状态,如选通信号,直到示波器触发。
在CANBus TDM中,还可以使用对时间敏感的SMART触发。记住,在消息帧满足触发标准的任何时侯,CAN触发模块都会输出一个触发信号,SMART触发支持CAN触发作为触发源,触发两个触发事件之间的时间间隔,如图3所示,其中使用CAN触发在通道4上把毛刺触发设置为触发源。除毛刺触发外,还可以应用宽度触发、间隔触发和跌落触发。
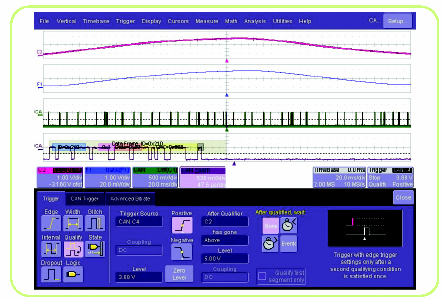

图2. 按通道2的幅度判定的CAN触发设置。
图3中的设置将触发相互之间相隔1.02 ms内发生的CAN消息。CAN触发设置成为所有消息帧生成触发输出,如图4所示。通过这种方式,我们可以看到在相互之间相隔1 ms内发生的所有可能的消息。另一个选项是使用CAN触发选择特定消息和/或内容,然后在特定消息定时满足用户自定义标准时触发。
CANbus TDM扩大了示波器的用途和功能。它无缝地集成到仪器结构中,因此可以与CANbus触发、解码测量和图示功能一起使用所有现有的功能。

图3. 基于小于1 ms的CAN触发之间时间的毛刺触发。
图4. 对毛刺触发设置,CAN触发支持所有消息帧。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。