引言
因为它体积小、重量轻、效率高等诸多优点被广泛应用于电子设备当中。现在开关电源大部分由PID控制,分为模拟PID和数字PID。由于PID算法简单,鲁棒性好等优点,所以被广泛地用于开关电源控制回路之中。但是常规的PID参数整定方法复杂,由于参数的整定不当,往往性能欠佳。而近来发展起来的模糊控制法不依赖被控对象的数学模型,便于利用经验和知识实行控制,非常适合复杂可变或不能准确描述数学模型的系统。所以本文综合两者的优点采用模糊PID的控制算法来实现对开关电源的控制。
1 BUCK变换器工作原理
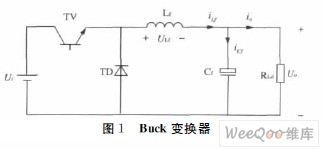
BUCK变换器结构如图1所示,其中Ui是电源电压,TV是功率开关管,LF是电感,CF是电容器,TD是单向导通二极管,R1d是负载,U0是输出电压。开关周期为Ts,占空比为d。
(1)连续模式下连续模式下电感电压和电流波形如图2所示。

可以看出在电感电流连续模式下,当输入电压不变时,输出电压随输入电压线性变化,在此不做详细讨论。
(2)断续模式下电感电流断续模式下电感电压电流波形如图3所示。

因为要研究BUCK变换器的动态性能和设计控制器,所以得到DCM方式时BUCK变换器的小信号模型如图4所示。

DCM时BUCK变换器有两个极点和一个右半平面的零点。由于在DCM时一般电感L相对较小,所以右半平面的零点远离原点,通常比开关频率高的多。
由电感决定的极点远离原点,通常接近或比开关频率更高。因此,DCMBUCK变换器可近似为具有单极点的系统,如图5所示。
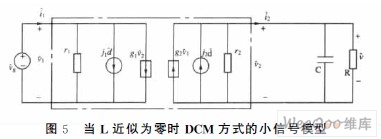
由图5求出控制至输出的传递函数并可以简化为:

输入至输出的传递函数简化为:

其小信号模型参数如下:
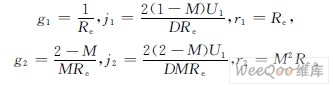
式中,输入输出直流电压增益:

控制至输出的直流增益:

输入端口等效电阻:

输入至输出的直流增益:

2 模糊PID控制器的设计
下面建立隶属函数。如图6所示,Ug为给定电压,Ur为反馈电压,e和ec为偏差和偏差变化率,E和EC为模糊后的偏差和偏差变化率。模糊控制器的输入U经反模糊成u,再经过PWM电路控制开关电源的主电路。设计为两输入三输出的模糊PID控制器。
输出是ki,kp,kd,输入量是偏差和偏差变化率e和ec。
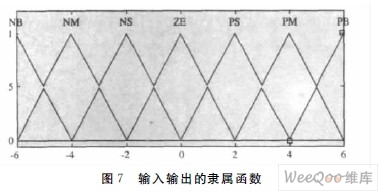
输入和输出的模糊子集为{NB,NM,NS,ZE,PS,PM,PB},子集中的元素分别代表负大,负中,负小,零,正小,正中,正大。论域为[-6,6],量化等级为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}:在Matlab中键入Fuzzy命令,进入模糊逻辑编辑窗口,建立输入和输出的隶属函数,如图7所示选择的是Trimf(三角形)隶属函数。
在各语言变量论域上用以描述模糊子集的隶属函数如图7所示。
根据前人总结的控制规律的经验,所得的模糊控制表如表1,2,3。



根据上面三个表格可以得到147条控制规律:

在Matlab里打开ruler editor窗口,输入模糊控制规律,与方式(And method)为min,或方式(ormethod)为max,推理为min,合成为max,去模糊为重心平均法。建立了FIS文件,取名Fupdi.fis。在MATLAB的文件编辑器里建立一个fpid.m的文件,martrix-readfis('fupdi.fis'),从而完成模糊工具箱与Simulink的链接,以便建模时用到。
3 模糊PID控制的模型及仿真模糊
PID控制模型如图8。模糊PID控制器仿真模型如图9。
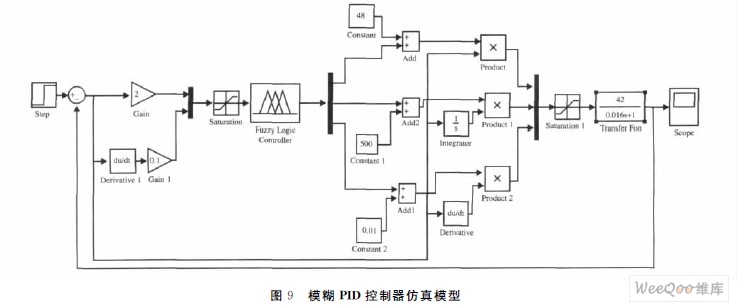
BUCK电路的参数:输入电压Ui=46V,输出电压U0=5V,电感L=6μH,电容C=400H,负载R=10Ω,开关频率f=80kHz,由公式(1)可以得出BUCK变换器在DCM模式下控制至输出的传递函数为Gvd=421+0.016s,PID控制参数为kp=48,ki=500,kd=0.01。
如果想要改善控制效果的话,一般先调整比例因子再调整模糊控制规律和隶属度函数。
4试验结果
对传统的PID控制和模糊控制PID两种控制策略利用试验分别进行了仿真,从而对这两种控制策略进行了比较。
图10和图11是两种模型的响应曲线,可以看出模糊PID控制在超调量上明显比常规PID控制要小很多,这样在系统启动的时候过压就不会很大,对系统设备的保护是非常有好处的。

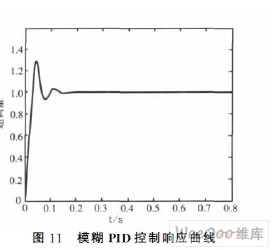
图12从(0.3~0.5s)系统加入扰动,模糊PID控制动态过程快速且震荡小,说明在抵御扰动的能力上模糊PID控制明显也要强于常规PID控制。

从以上的仿真曲线可以看出,采用模糊控制和传统的PID 相比,具有响应时间快,超调量小,调节时间短,抗干扰能力强等优点。
5 结束语
模糊控制是一种非线性控制,其控制规则是以实际经验为基础的。对于像开关电源这类非线性控制对象,控制上具有良好的鲁棒性和抑制超调的能力。可以预期,PID与模糊控制的结合,是开关电源发展的一个重要方向。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。