无刷直流电动机克服了普通直流电动机以机械方式换向,特别适合利用电子控制器件进行灵活控制,目前在机器人关节控制等高的自动化仪器中应用尤为普遍。比较典型的控制算法是采用传统的比例-积分-微分(PID)控制器进行控制。然而,PID控制器的性能完全取决于对其增益参数的调节。近年来,人们也提出用人诸如神经网络算法、遗传算法、和模糊逻辑控制等许多人工智能控制来设计PID控制器。其中,模糊逻辑控制以其对非线性和不确定参数的良好处理能力而著称,特别适合于去控制像直流无刷电动机这样的有着高度非线性性能和大量随机扰动的系统。本文将介绍一种基于采用模糊逻辑优化的无刷直流电机的控制方法,并进行仿真。
1 直流无刷电动机及其数学建模
无刷直流电机是一种典型的机电一体化产品,它是由电动机本体,位置检测器,逆变器和控制器组成。下面将以两项导通的星形三相六状态方式为例,分析无刷直流电动机的数学模型。
1.1 三相绕组端电压方程
由于转子的磁阻不随转子的位置变化而变化,因此定子绕组的自感和互感为常数。考虑到三相绕组为星形连接ia+ib+ic=0,因此Lmia+L-mib+Lmic=0;三相绕组的端电压平衡方程:

式中,ua,ub,uc为定子相绕组电压,V;ia,ib,ic为定子相绕组电流,A;ea,eb,ec为定子相绕组反电动势,V;r为每相绕组的电阻Ω;Ls为每相绕组的电感,H;Lm为每两相绕组间的互感,H;uN为电机系统的中性点电压。
由此可得BLDCM的等效电路如图1所示。图中Ud为直流侧电压,VT1~VT6为功率开关器件,VD1~VD6为续流二极管。

1.2 绕组反电动势方程
忽略铁心饱和及齿槽效应,定子各相电阻,电感均相等,转子上无阻尼绕组,定子绕组感应电势为典型的120°梯形波。由此,便可以得到定子A相绕组的反电动势在0~2π区间内的函数表达式

式中,ωr为转子机械角速度;ke为反电动势系数。同理可得到eb和ec的函数表达式。
1.3 转矩方程和运动方程

2 模糊PID控制方法
为了实现实时和高准确率的控制从而提高直流无刷电动机的输出性能,下面我们将来设计一种模糊PID控制器来调节PID控制器的增益参数。
2.1 PID控制
连续PID控制的数学表达式

式中,e(t)为系统输入和输出的差值,u(t)为由PID控制器产生的控制信号,Kp为比例增益,T1为积分时间常数,TD为微分时间常数。
离散PID控制的数学表达式

式中,KI=KPT/TI,KD=KPTD/T,T为采样周期;KP,KI和KD为3个可调节的参数。PID控制器的任务便是决定这些参数的值。
2.2 模糊PID控制器
图2所示是一个典型的模糊PID控制器的结构图,图中nr为给定电动机的转速,n表示实际电动机的转速,e为系统误差,ec为e的微分值。当电动机工作时,在每个采样周期,通过模糊控制指令,模糊推理机制便检测e和ec的变化率,从而分别产生它们的模糊变量E和Ec。然后,该控制器将会即时对PID控制器原有的KP,KI和KD三个参数进行调节,从而使得PID控制器总是能够对直流无刷电动机产生控制信号。

在该系统中,KPf,KIf和KDf表示KP,KI和KD逻辑变量的增量。根据E(k)和Ec(k)的值,它们的模糊语性值E和Ec如表1所示。
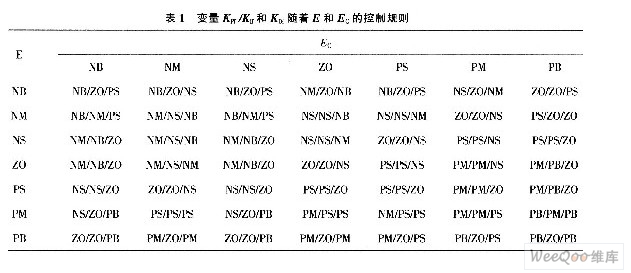
模糊控制规则是的经验和操作者的技能加以总结而得出的模糊条件语句的集合。在本文模糊PID控制方法中,模糊库用以下49条模糊语句描述:

式中,KP0,KI0和KD0为原始的PID控制器参数,一般由Ziegler-Nichols调试方程给出。D[x]为去模糊过程。
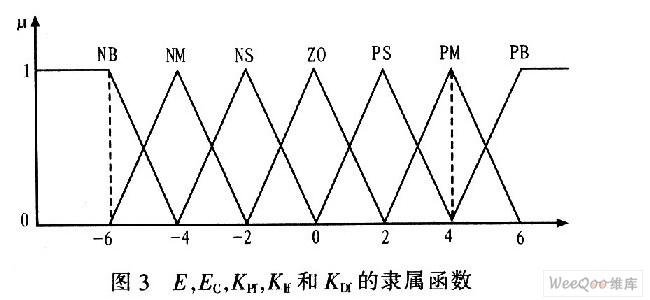
E,Ec,KPf,KIf和KDf的模糊逻辑全部定义为:{NB,NM,NS,ZO,PS,PM,PB},分别代表:大负、中负、小负、零、小正、中正、大正。另外,这些变量的论域全部被定义在-6到+6的整数区域,隶属函数为三角形函数,如图3所示。
3 仿真模型的建立
本文采用Matlab/Simulink搭建仿真模型实现BLDCM的整个系统控制。本文将根据上述的电机数学模型建立BLDCM的仿真模块。
BLDCM控制系统采用转速和电流环双闭环调速。转速外环由模糊PID调节器进行优化控制,电流内环采用三角波比较调节,而不采用滞环比较控制,从而抑制由于开关频率不恒定而产生的大量开关噪声。整个系统包括BLDCM本体模块,电压逆变器模块,速度PI控制模块,电流控制及PWM信号产生模块。
整个系统仿真框如图4所示,其中模糊控制采用Simulink中含有的模糊控制模块进行设计,PID模块部分将分别对加入模糊PID控制器和未加入模糊的PID控制器进行仿真实验。

4 仿真结果与分析
为验证模型的正确性,将对仿真模型进行仿真。BLDCM的参数如下:额定电压ucd=450V,转动惯量J=8.0×10-4N·m2,定子电阻r=2.8 75 Ω,定子电感Ls=8.5x10-3H,互感Lm=0.37×10-3H,极对数nb=4,反电动势系数ke=0.1805 V/(rad·s-1)。
为了验证所设计的BLDCM的控制系统的仿真模型的静、动态性能,在0.3s给电机加入负载,测得转速稳定下模糊PID控制下和一般PID控制下A相转速、转矩和电流仿真曲线如图5所示。

由仿真图可看出,加入模糊PID控制器的系统在参考转速下,与一般PID控制器系统相比系统相应快速而平稳,转速超调量明显降低;加入负载后转矩脉动比较小,且回到正常转速的时间也较短;相电流的波形也较为理想。
5 结论
在分析了无刷直流电动机数学模型的基础上,提出一种基于模糊PID控制器的控制系统仿真建模方法,采用转速和速度双闭环控制方法对该建模方法进行了测试,仿真试验结果表明:与一般PID控制器控制的直流无刷电动机系统相比,经模糊PID控制器控制的系统反应能力更快,调节更高,稳定性能更好。另外,本仿真实验也表明,这种控制方法适合机器人关节控制所需要的准确度和,为作者下一步基于TI公司TMS28系列的DSP机器人关节控制器的设计奠定了基础。
免责声明: 凡注明来源本网的所有作品,均为本网合法拥有版权或有权使用的作品,欢迎转载,注明出处。非本网作品均来自互联网,转载目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责。