
汽车ESP就是指汽车的电子稳定系统,也叫动态偏航稳定系统,英文全称为Electronic Stability Program,它是一种牵引力控制系统,不但可控制汽车的驱动轮,而且可控制汽车的从动轮,具有稳定行车安全的作用。汽车EPS是博世(Bosch)公司的专利。
汽车EPS是由机械式转向装置、驱动电机、减速器、扭矩、扭矩传感器及控制单元等组成,它根据作用在方向盘上的转矩信号和车速信号,通过电子控制装置使电机产生相应大小和方向的辅助力,协助驾驶员进行转向操纵,并获得转向特性的反馈伺服系统。其系统结构与原理如下图所示。
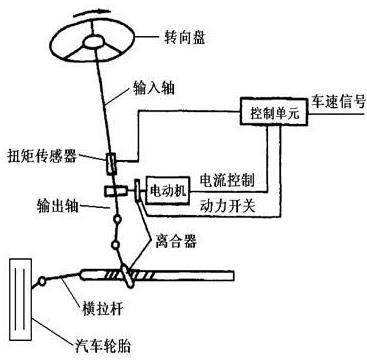
汽车EPS基本的工作原理如下:该系统工作时,转向传感器检测到转向轴上转动力矩和转向盘位置两个信号,与车速传感器测得的车速信号一起不断地输入微电脑控制单元,该控制单元通过数据分析以决定转向方向和所需的助力值,然后发出相应的指令给控制器,从而驱动电机,通过助力装置实现汽车的转向。通过精确的控制算法,可任意改变电机的转矩大小,使传动机构获得所需的任意助力值。
1、节能环保。由于发动机运转时,液压泵始终处于工作状态,液压转向系统使整个发动机燃油消耗量增加了3%~5%,而EPS以蓄电池为能源,以电机为动力元件,可独立于发动机工作,EPS几乎不直接消耗发动机燃油。EPS不存在液压动力转向系统的燃油泄漏问题,EPS通过电子控制,对环境几乎没有污染,更降低了油耗。
2、效率高。液压动力转向系统效率一般在60%~70%,而EPS的效率较高,可高达90%以上。
3、回正性好。EPS系统结构简单,不仅操作简便,还可以通过调整EPS控制器的软件,得到的回正性,从而改善汽车操纵的稳定性和舒适性。
4、路感好。传统纯液压动力转向系大多采用固定放大倍数,工作驱动力大,但却不能实现汽车在各种车速下驾驶时的轻便性和路感。而EPS系统的滞后特性可以通过EPS控制器的软件加以补偿,使汽车在各种速度下都能得到满意的转向助力。
5、安装方便。EPS的主要部件可以配集成在一起,易于布置,与液压动力转向系统相比减少了许多元件,没有液压系统所需要的油泵、油管、压力流量控制阀、储油罐等,元件数目少,装配方便,节约时间。
1、助力控制:在汽车停车及低速行驶时提供较大辅助力矩,使转向过程快捷轻便地进行,而在汽车高速行驶时提供较小的辅助力矩以保持转向过程的可靠与沉稳。
2、回正控制:确保汽车从直行状态到大角度转向的过程中回正力矩相应地逐渐提高。另外,确保汽车在非转向状态下的直线行驶性能,并防止汽车在不同车速下实现回正时出现回正不足或回正超调的现象。
3、阻尼控制:利用电机感应电动势来减弱汽车高速行驶时出现的方向盘抖动现象,消除转向轮因路面不平而引起的方向盘摆振,并在汽车高速行驶时,给转向过程增加一定的阻尼,克服转向发飘的感觉。
4、分析诊断功能:应能实时监控运行状态,并具有故障报警和提示功能,在故障不能自动排除时关断EPS使车辆进入传统的机械转向模式。
5、通讯功能:应具有通过CAN或LIN总线与其他系统进行通讯的能力,并具有可以更改主要参数(主要针对电机控制)的接口。
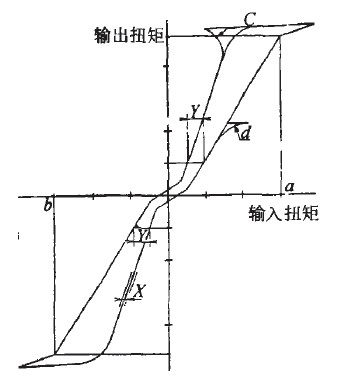
汽车EPS性能的好坏,通过在台架上测出各种车速下的输入输出扭矩特性曲线表现出来,如图所示。根据汽车的转向特性,在不同的车速下,输人输出扭矩特性曲线是不一样的。车速越低,助力越大;反之,助力越小。
输入力矩一输出力矩特性通过以下几个指标衡量:
(1)输入力矩与输出力矩的比例关系。输出力矩与输入力矩的比值越大,其助力效果越明显。
在车身前轴质量大、车速较低的情况下,输出力矩与输入力矩的比值需要加大;反之,输出力矩与输入力矩的比值需要减小。
输出力矩与输入力矩的比值通过预先设定的程序来控制。但是,输出力矩受电机功率的限制。
(2)两侧不同输入力矩/输出力矩差异。
图5中的I口一6l就是两侧不同输入力矩/输出力矩差值。
该数值越小,说明其正向助力与反向助力的对称性好;数值越大,会导致正反向助力大小不一,使驾驶员在转向时感到一个方向手感重,另一方向手感轻,严重时导致方向老是往一边跑。
(3)输入输出力矩曲线的波动。图5中的值是输入输出力矩曲线的波动量,X值越小,助力越平稳,驾驶员的手感越好。
影响测量曲线波动量的因素主要有以下几个方面:①滑块在输入输出轴上运动的灵活性。
灵活性越好,X值越小;这与输入输出轴运动副光洁度有关;②控制程序在电流的反馈与各种补偿过程中,如果参数选择不当,使其控制信号波动太大,导致x值波动大;③扭矩传感器电阻膜分布的均匀性越好,X值波动越小;④蜗轮蜗杆传动的平稳性;⑤电机工作的稳定性。
(4)滞后现象。图5中的y值是输入输出特性曲线的滞后,y值越小,转向系在回位时的跟随性越好。
影响y值大小的主要因素有以下3个方面:
①与滑块在输入输出轴上运动的摩擦力大小有关,摩擦力越大,y值越大;②与电机的机械摩擦、惯性矩等因素有关,机械摩擦、惯性矩越大,值越大;③与蜗轮蜗杆传动的摩擦力和齿型啮合参数有关。
(5)曲线异常。图5中的C、d曲线属于助力异常,这种情况是不允许出现的,这种异常情况与控制模块、扭矩传感器及扭力杆及电机故障有关。
1、国外汽车EPS的发展状况:
因为微型轿车上狭小的发动机舱空间给液压助力转向系统的安装带来了很大的麻烦,而EPS元件比较少,重量轻,装配方便,比较适合在微型轿车上安装。因此在国外,EPS系统首先是在微型轿车上发展起来的。
上世纪80年代初期,日本铃木公司首次在其Cervo轿车上安装了EPS系统,随后还应用在其Alto车上。此后,EPS在日本得到迅速发展。出于节能环保的考虑,欧、美等国的汽车公司也相继对EPS进行了开发和研究。虽然比日本晚了10年时间,但是欧美国家的开发力度比较大,所选择的产品类型也有所不同。日本起初选择了技术相对成熟的有刷电机。
有刷电机比较成熟,在汽车上的应用较广,比如雨刷、车窗等部分,稍做改进就适应了EPS的要求,因此研发周期较短,上世纪80年代末期就开始产业化,主要装配在微型车上。而欧美则选择了难度较大的无刷电机,但是电子控制系统比较复杂,延长了研发周期。直到90年代中期欧美才开始批量生产。从长远发展看,有刷电机存在一定弊端,比如电刷产生的噪声较难克服,磨损较严重,存在电磁干扰等问题。因此,日本现在国内配装的EPS也逐渐转向无刷电机类了。
2、国内汽车EPS的发展现状:
我国汽车电子行业的总体发展相对滞后,但是,随着汽车对环保、节能和安全性要求的进一步提高,代表着现代汽车转向系统的发展方向的EPS电动助力转向系统已被我国列为高新科技产业项目之一,国内各大院校、科研机构和企业已经纷纷开始对EPS这一领域进行了研究,使得EPS得到了迅速的发展。据悉,自主品牌研发的EPS系统离产业化就差整车厂批量装车认可这一台阶了,相信很快就可以实现量产